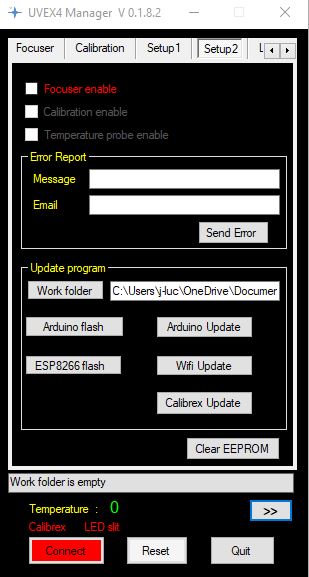
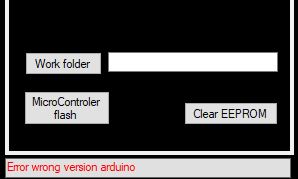
Vous devez nécessairement définir le répertoire de travail. Dans ce répertoire , les différents fichiers binaires y seront stockés de manière temporaire, juste le temps de la mise à jour.
Cliquer sur Work Folder pour définir le répertoire .
Concernant l’Arduino Méga :
cas 1 : Cliquez sur le bouton Arduino flash et choisissez le fichier binaire. La mise à jour se fait automatiquement . Les leds de l’arduino clignotent pendant le téléversement
cas 2 : Cliquer sur Arduino Update . La mise se fait automatiquement . Les leds de l’Arduino clignotent pendant le téléversement
Concernant le module ESP8266 :
Pour devez configurer la carte en mode programmation WIFI .
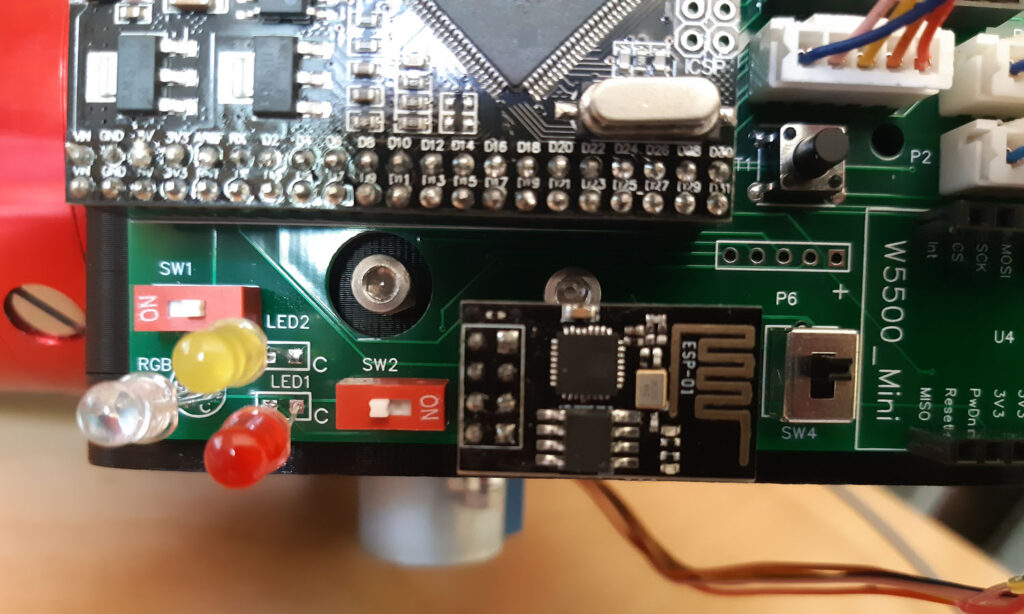
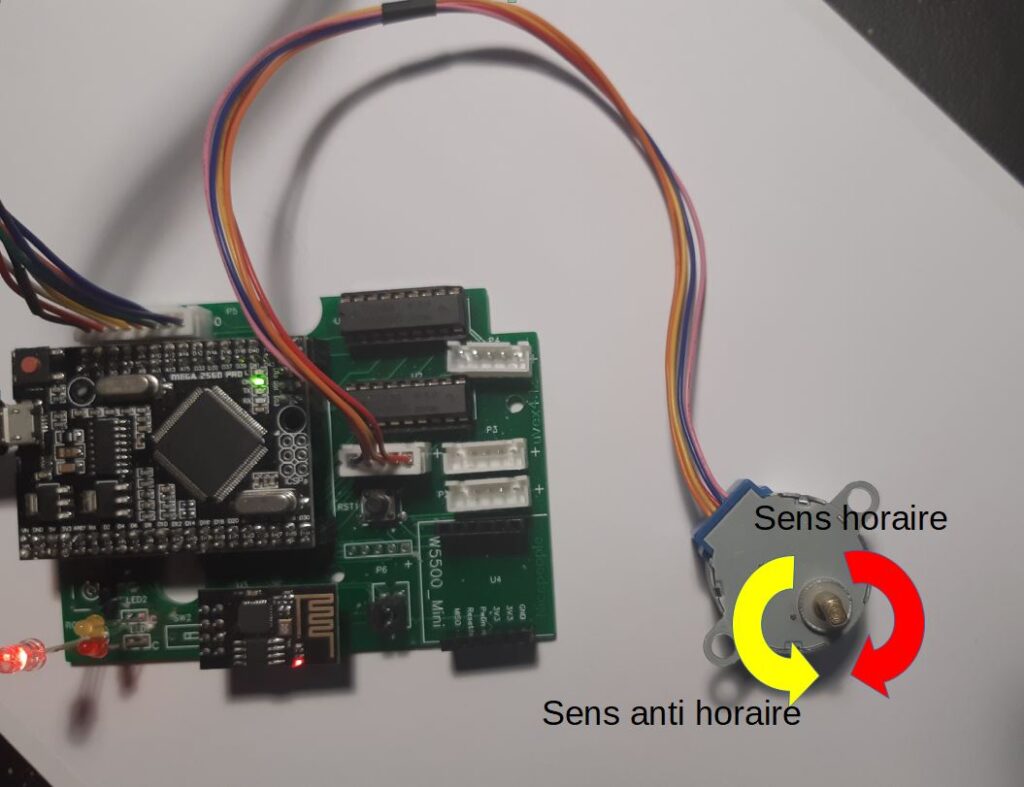
Avant toute chose il est nécessaire de déconnecter le module (carte mère) en cliquant sur « deconnect », à ce moment la vous pouvez passer en mode mode programmation WIFI, il faut commuter SW1, SW2 sur « ON » et basculer SW4 vers le bas ( côté SW4) . Enfin faire un appui sur le bouton RST1. Le repérage de ces switch et bouton poussoir sont facilement visibles sur le circuit imprimé ( sérigraphie blanche sur photo ci dessous ).
Insérer le module ESP à programmer sur le support WIFI de la carte mère.
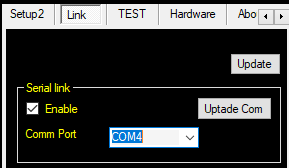
Choisissez le port COM sur lequel l’UVEX est branché ( Voir onglet Link/Serial link)
cas 1 : Cliquez sur le bouton ESP8266 flash et choisissez le fichier binaire. La mise à jour se fait automatiquement . La led bleue du module ESP clignote pendant le téléversement
cas 2 : Cliquer sur le bouton Wifi Update s’il s’agit de mettre à jour le module ESP de l’UVEX4 ou bien sur le bouton Calibrex Update, s’il s’agit de l’ESP du CALIBREX .
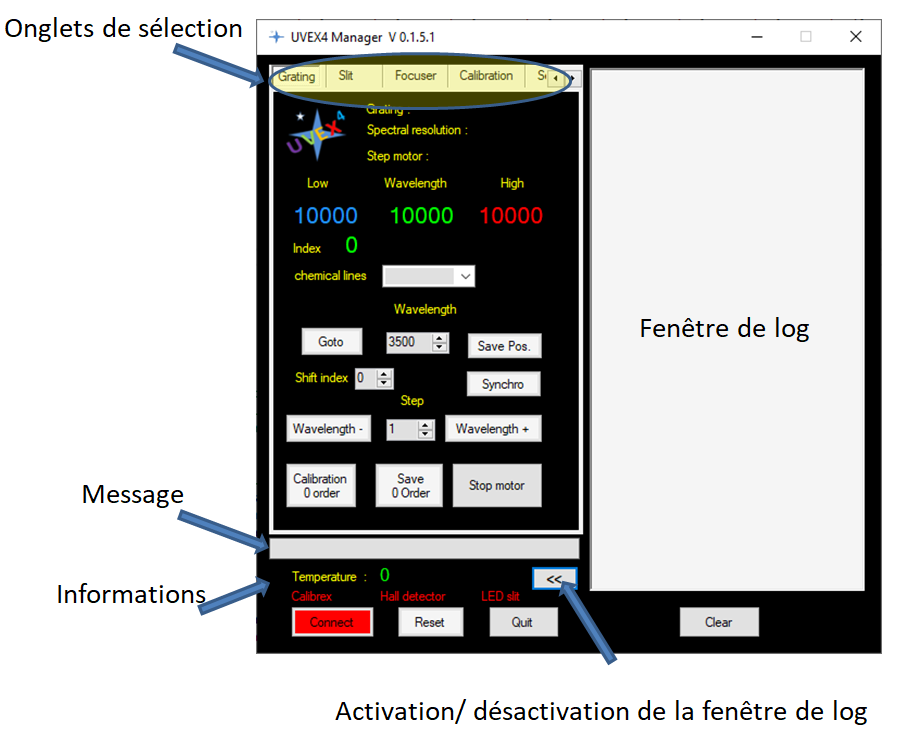
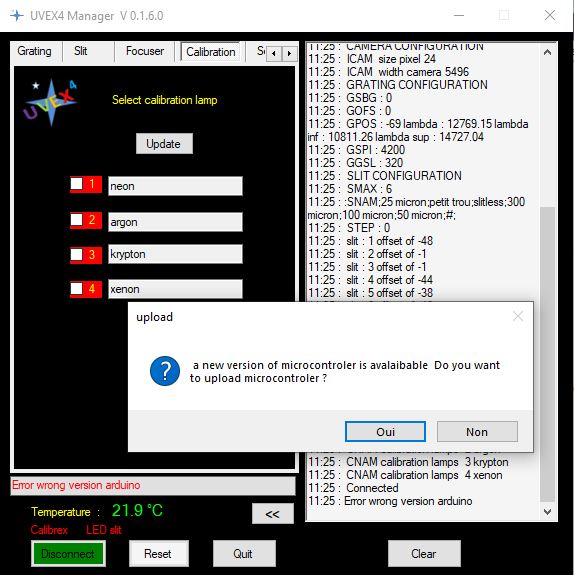
Quand le programme se charge dans l’ESP 8266 vous pouvez voir dans la fenêtre de LOG le déroulement des opérations effectuées (quelques dizaines de secondes) .
Réinitialisez l’ESP en appuyant sur le bouton Reset RST1 .
Ne pas oubliez de remettre les interrupteurs SW1 et SW2 sur OFF et l’interrupteur SW4 vers le haut ( côté P6). Ne pas oublier de connecter le module ( carte mère) en cliquant sur « connect »