




































 Ici la géométrie de l’UVEX4 avec le fameux logiciel Geogebra:
Ici la géométrie de l’UVEX4 avec le fameux logiciel Geogebra:
Géogebra interactif

Ici la géométrie de l’UVEX4 avec le fameux logiciel Geogebra:
Géogebra interactif

Hi
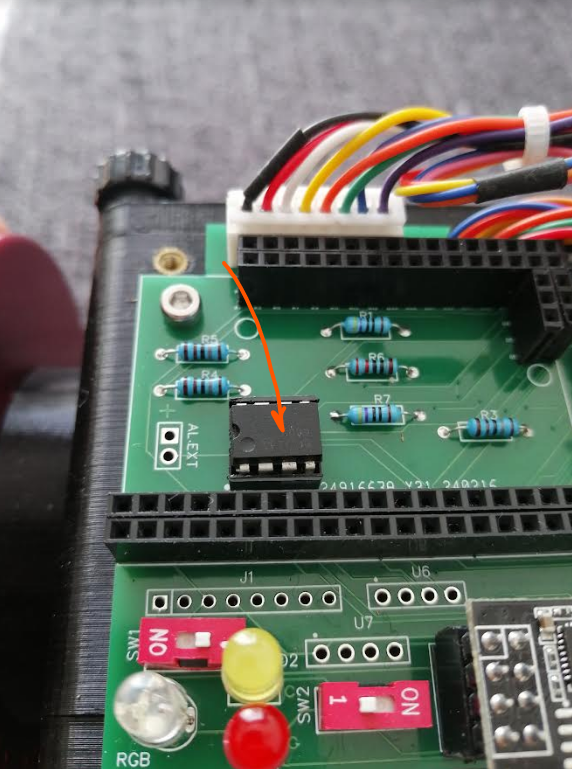
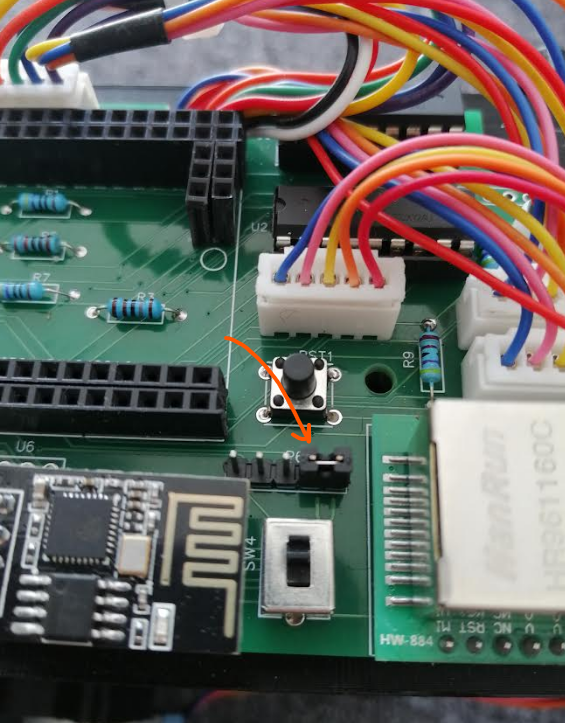
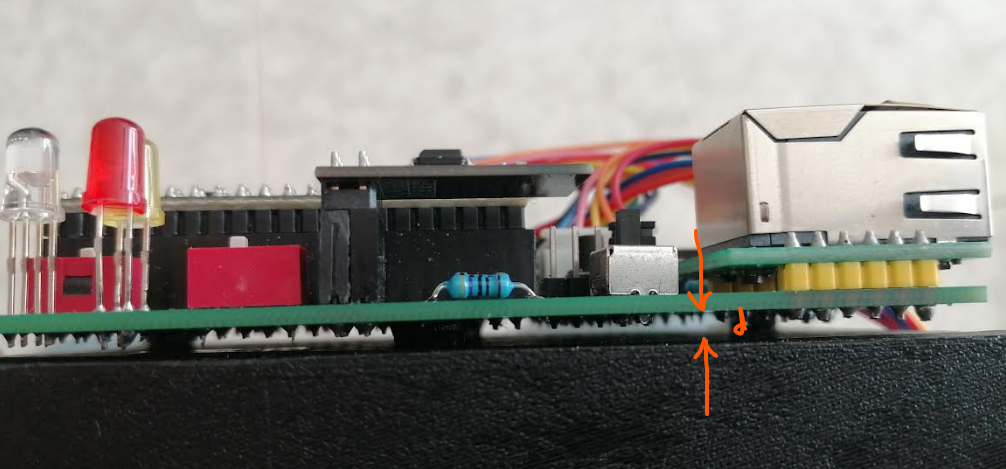
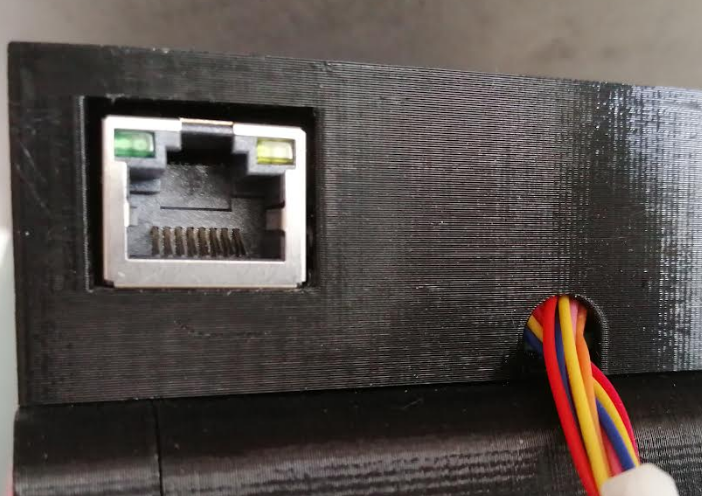
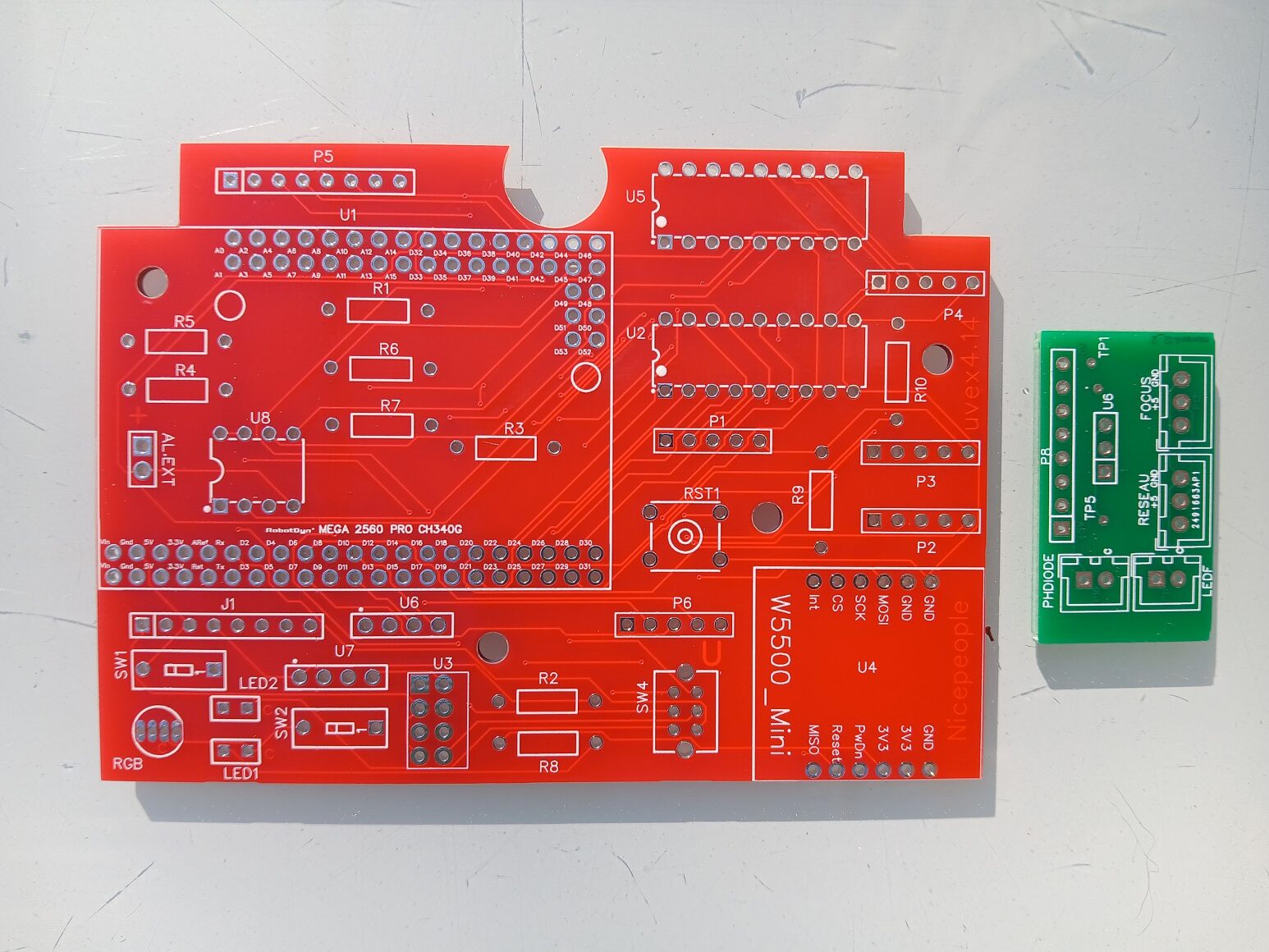
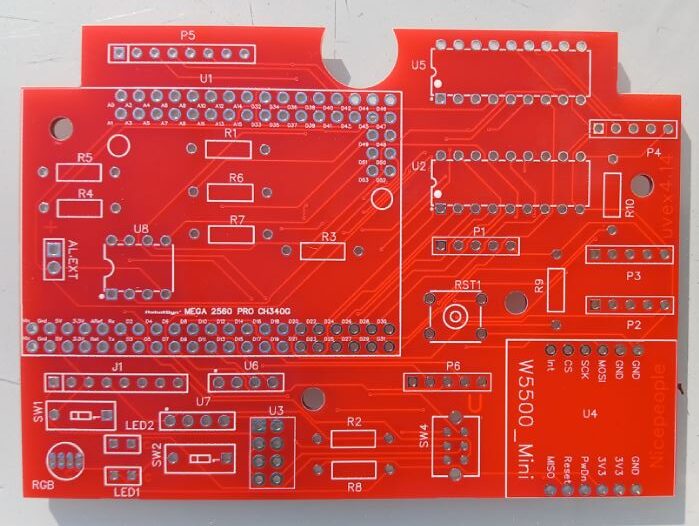
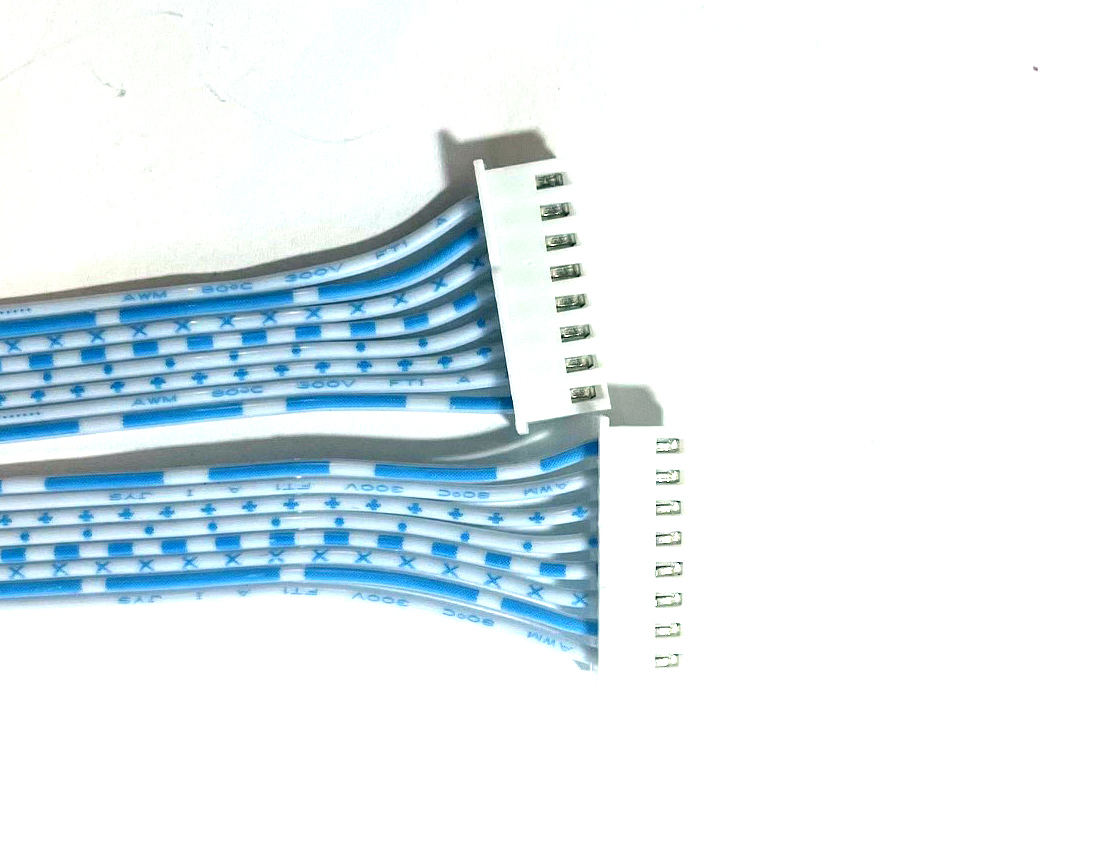
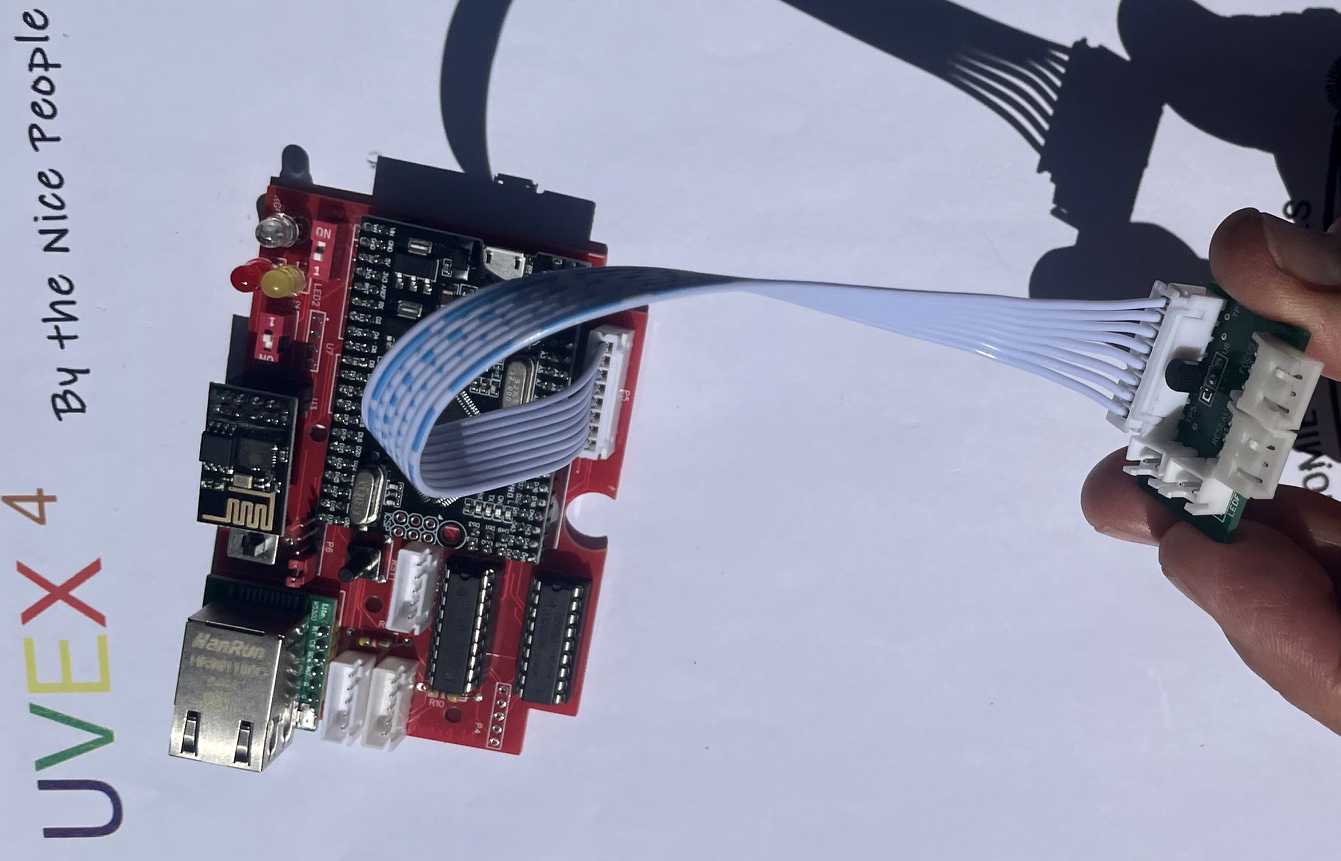
I would like to mention, that the holes on the PCB Board for the W5500 are too small.
I ordered 2 Boards a few months ago
My best regards
Stefan
Bonsoir Stefan,
Nous sommes désolé pour le problème d’implantation du WE5500, effectivement dans les versions antérieures le WE5500 était soudé sur un support et donc les trous du support étaient de bonne taille, maintenant nous soudons directement le WE5500 sur le PCB . Donc nous vous envoyons le bon PCB, nôtre dernier qui est stock. J’ai refait la fabrication de 20 PCB ce matin , dés réception je vous envoie le deuxième aussi à vôtre adresse.
Cordialement
Alain.L
Bonjour
J’ai un UVEX4 et je trouve ce projet super et j’aimerais porter le projet sur ESP32 et Linux (je n’ai aucun windows et n’en aurai jamais), est-ce envisageable? Je peux le refaire from scratch tout en étant compatible mais ça serait vraiment bête de réinventer la roue …
Cordialement,
F.
Bonjour Franck,
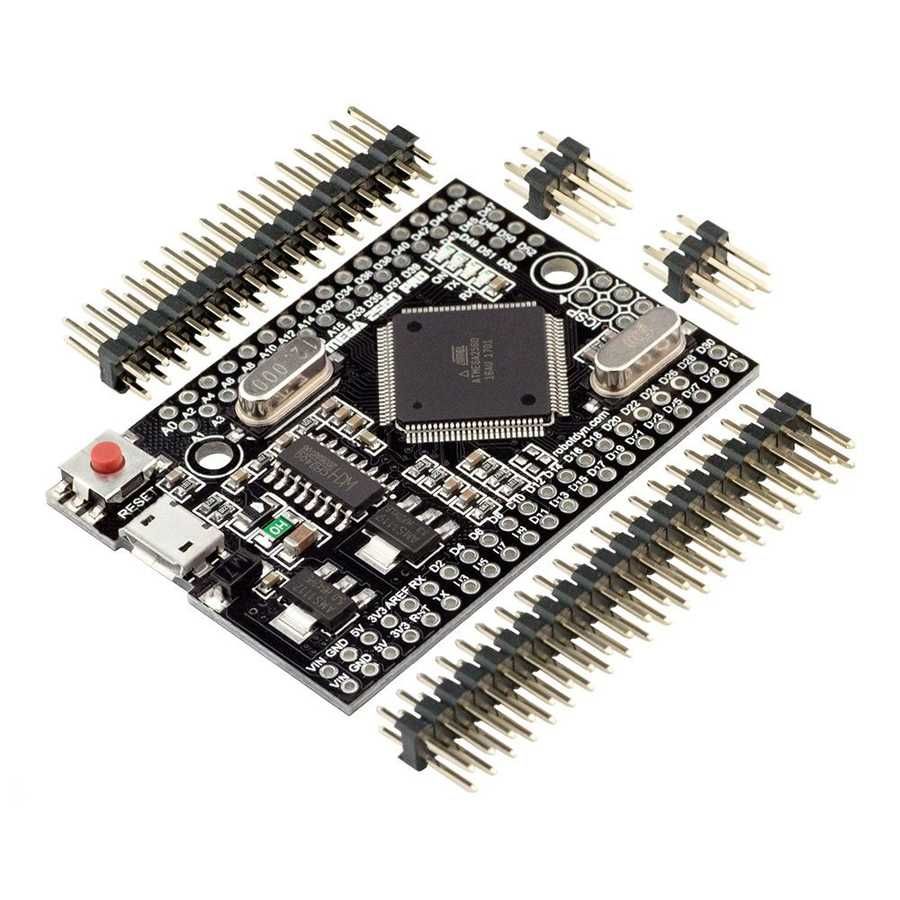
Concernant l’ESP32, nous n’avons pas retenu ce microcontrôleur, notamment parce que ses entrées/sorties fonctionnent en 3,3 V, alors que nous avons besoin de 5 V pour piloter les moteurs pas à pas, entre autres limitations.
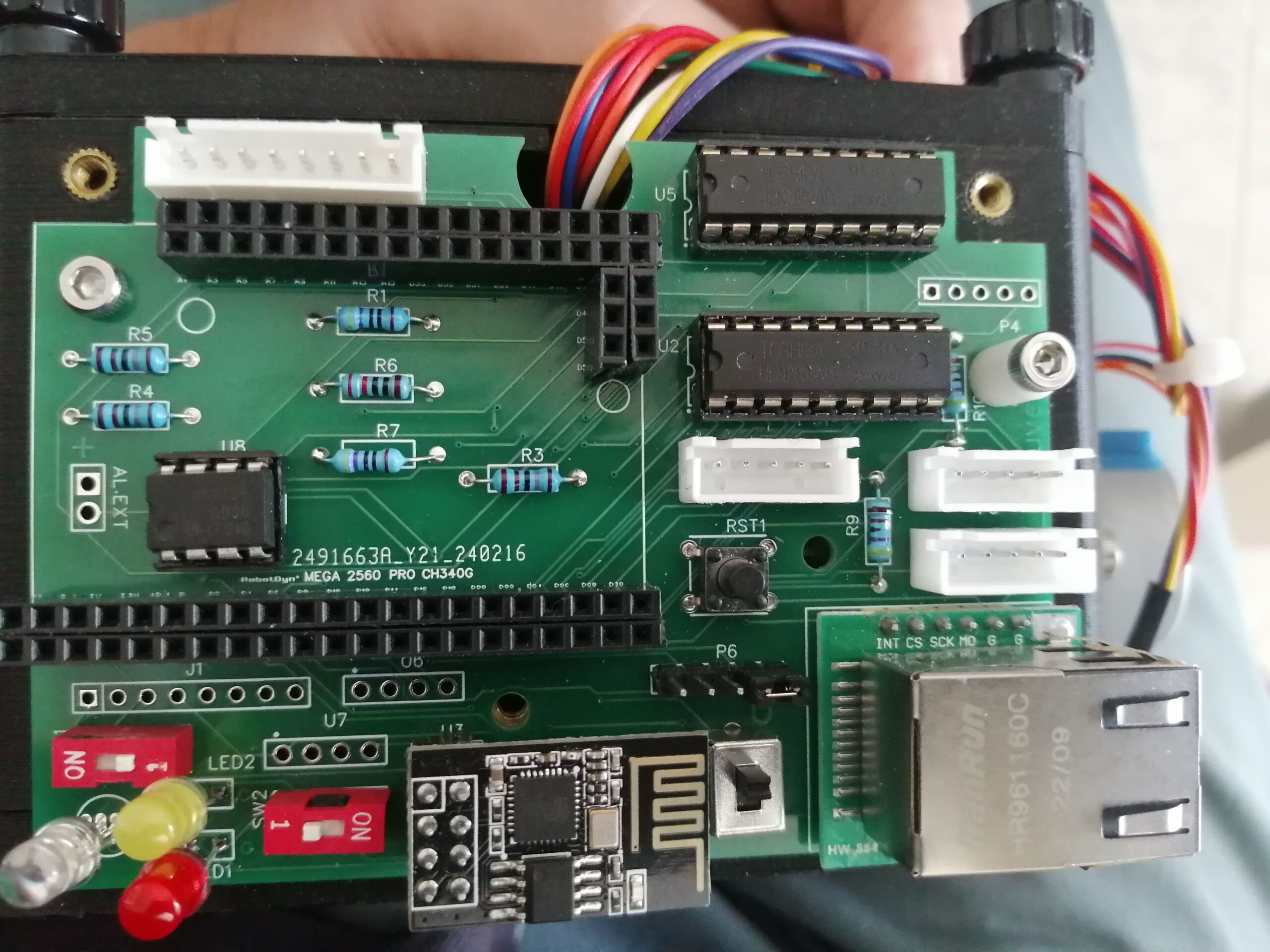
La solution actuelle, basée sur un Arduino Mega 2560 et un ESP8266, fonctionne parfaitement depuis plusieurs années. Bien sûr, tout serait techniquement faisable, mais cela nécessiterait beaucoup de temps pour reconcevoir une nouvelle carte PCB.
Ce spectrographe peut être piloté depuis n’importe quelle plateforme — Linux, macOS, Windows, etc. — dans la mesure où toutes les commandes sont intégrées dans le microcontrôleur. La liste des commandes est disponible sur le site : https://spectro-uvex.tech/?p=3178
Chacun peut donc développer son propre logiciel de gestion pour l’UVEX, que ce soit pour les tests, la configuration ou le pilotage.
Il existe actuellement, dans CCDciel, une bibliothèque Python permettant de gérer le spectrographe aussi bien via le port USB que par Ethernet, par l’intermédiaire d’une API REST du style ASCOM Alpaca.
En vous souhaitant de bons spectres.
Cordialement,
Jean-Luc Martin
Bonjour,
Je comprends, mais la limitation 3.3V est facilement contournable (j’ai déjà fait plusieurs systèmes basés sur ESP32 mais utilisant du 5V) . Je ne dis pas que la solution actuelle ne fonctionne pas, c’est juste que j’aimerais une solution 100% ouverte où chacun peut apporter sa pierre à l’édifice sans attendre ou dépendre d’une release « officielle ». Quant au PCB, aucun souci pour moi, je n’en suis pas à mon premier projet !
Dans tous les cas j’avancerai sur ma base ESP32 et la mettrai en open source sur github (avec le design PCB, etc.). Encore bravo pour le travail effectué !
Cordialement,
F.L.
Hi
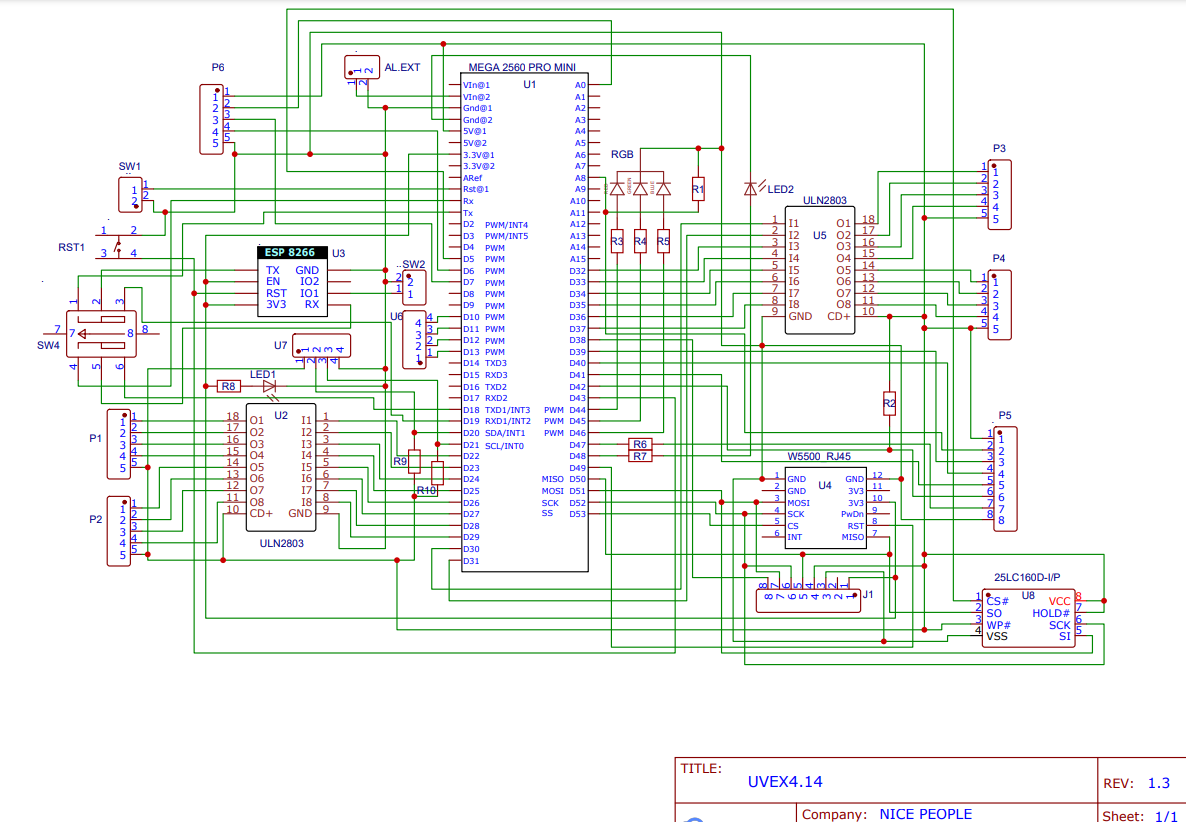
After completing one of the two boards which I ordered a while ago I was not able to write to the external EEPROM. It took a while until I found out the reason. This Board uses the SPI protocol for accessing EEPROM and the ethernet stuff.
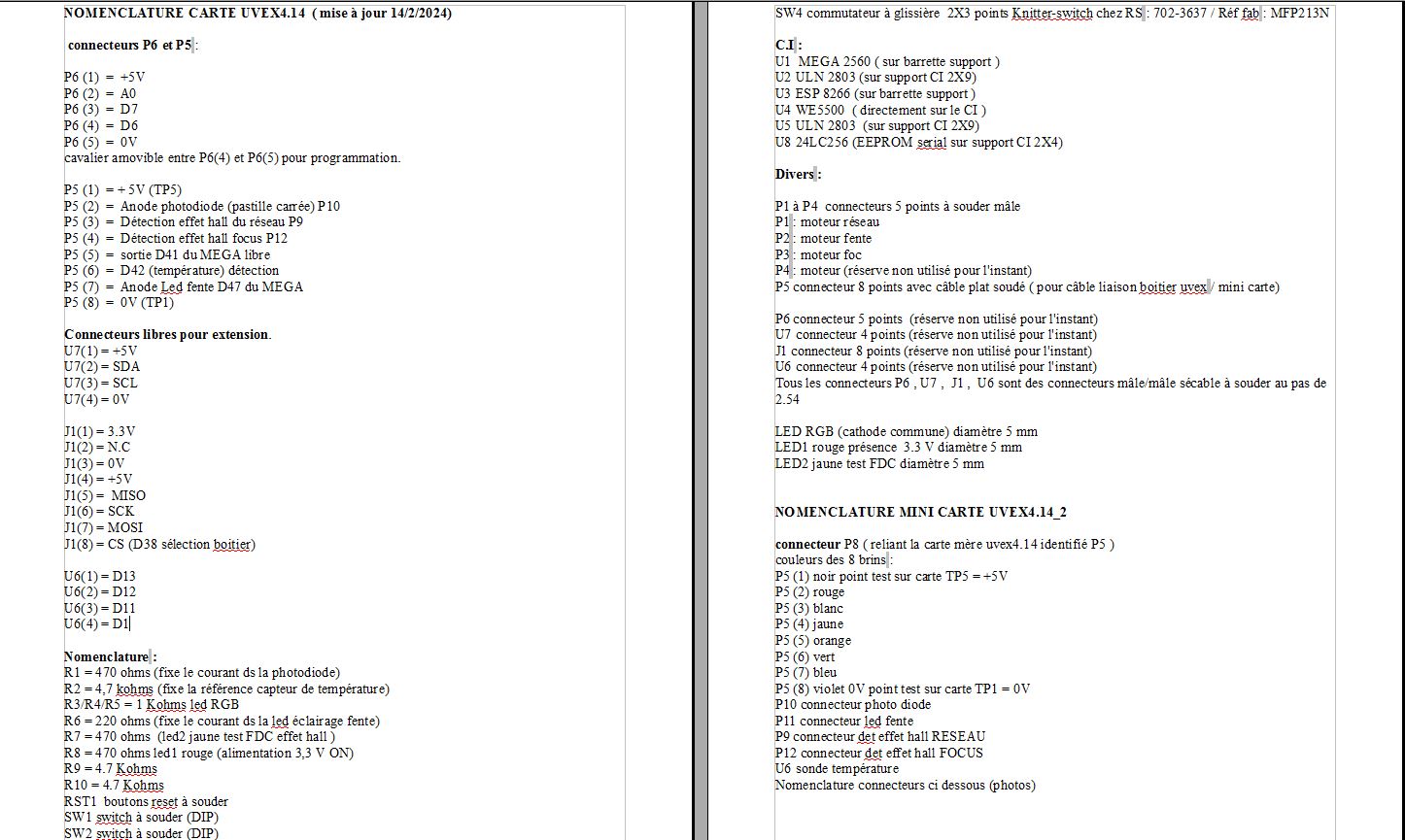
Therefore it needs a 25LC256 instead of a 24LC256 which supports I2C.
My best regards
Stefan
Bonjour Stefan.
Bien vue pour la remarque et merci encore pour cela. Effectivement il faut utiliser une mémoire EEPROM 25LC256, ça sera corrigé sur le site.
Donc lire sur le site dans la nomenclature : U8 : 2EPROM 25LC256 et non 24LC256.
Alain Lopez
Bonjour Monsieur ,
J’aimerais bien savoir ce qu’est un ULN 2803 et un ULN 2803 Miroir , je suis novice dans l’électronique et je ne comprend pas trop
la différence
Cordialement
Pascal
Bonjour
Je ne comprends pas trop vôtre question, sur « ULN2803 Miroir ». la carte électronique possède deux circuits ULN2803 respectivement U5 et U2 (voir nomenclature) , ceux sont des drivers pour piloter les moteurs pas à pas.
Ce ceux sont des classiques pour driver ce genre de moteur.
cordialement
Alain