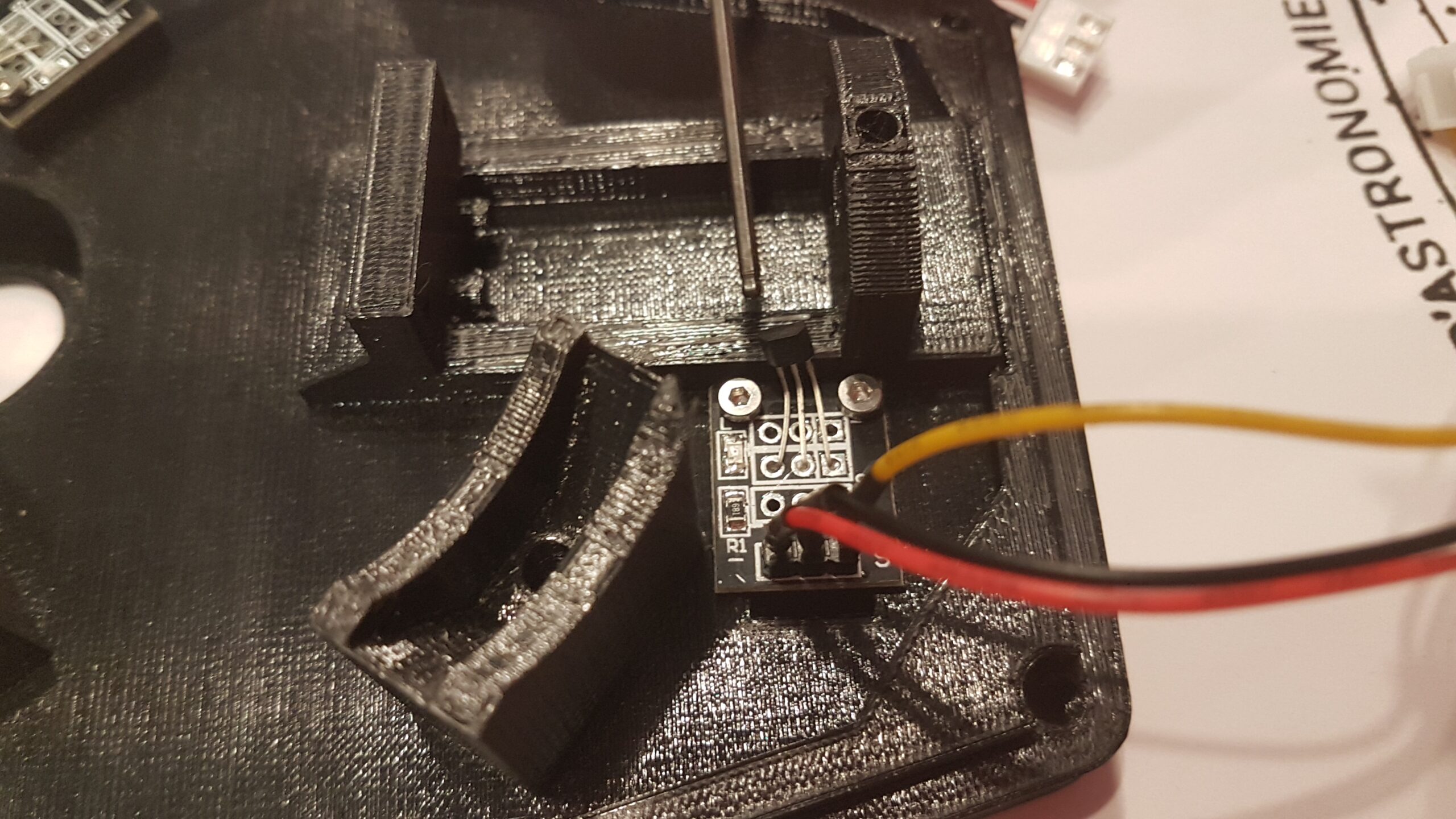
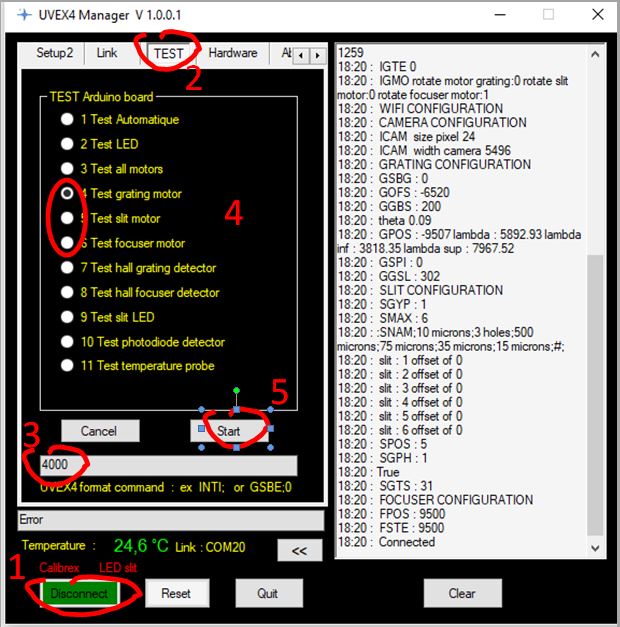
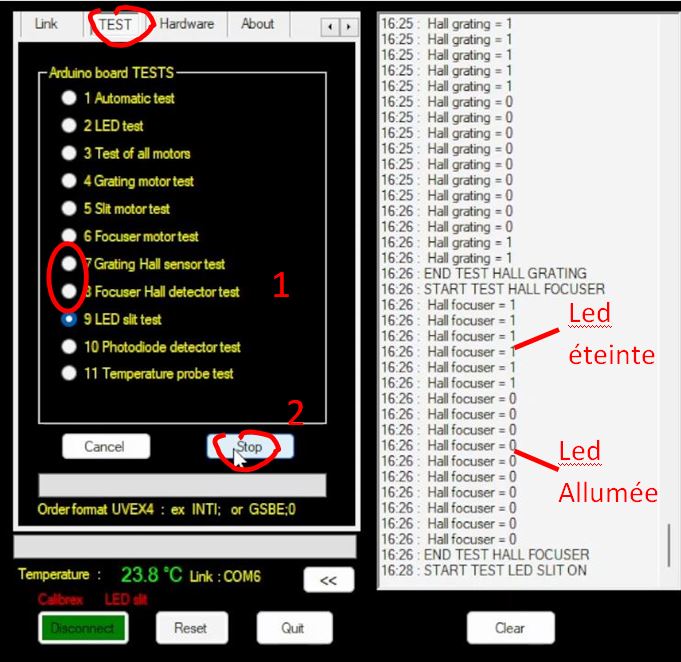
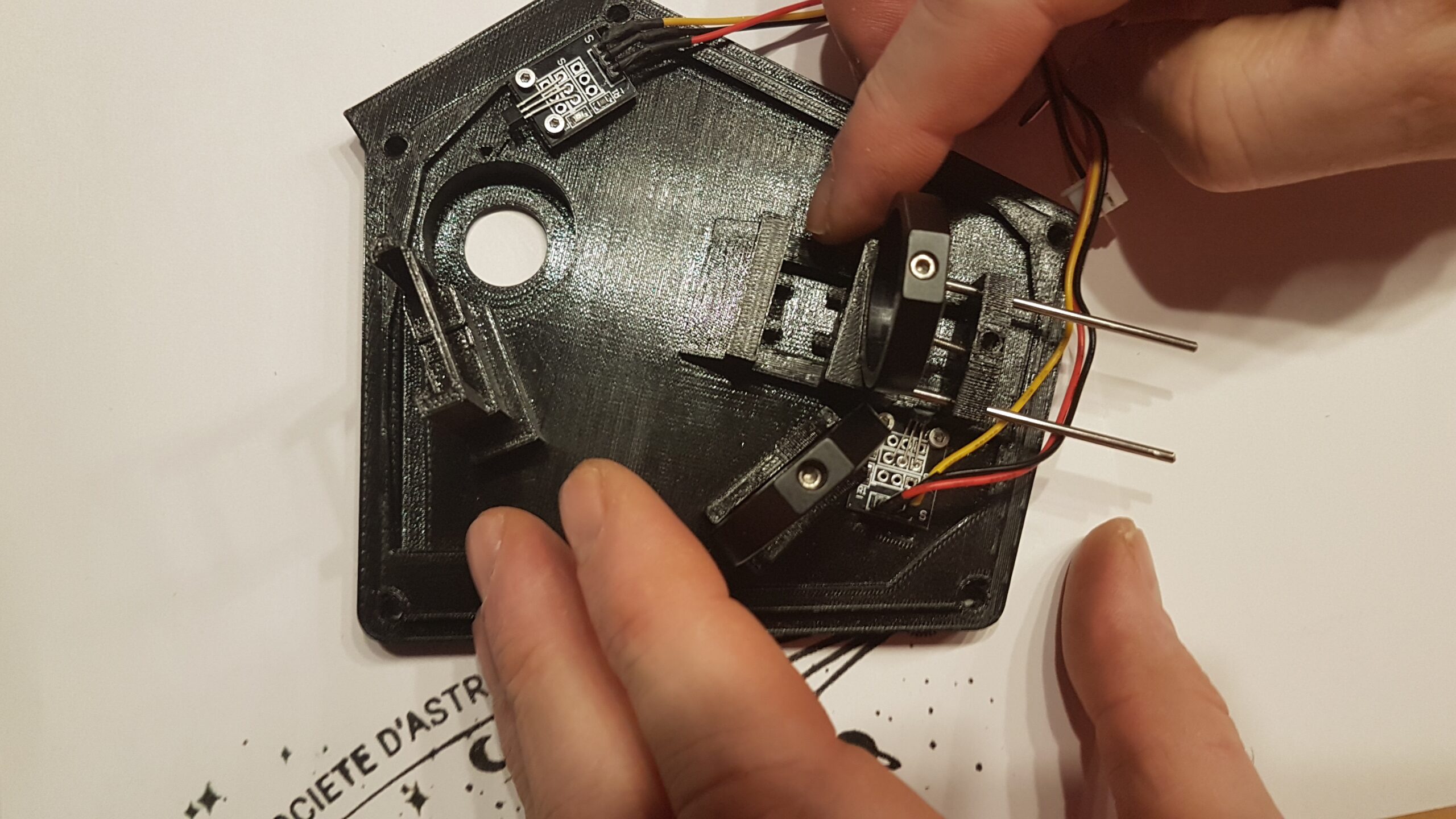
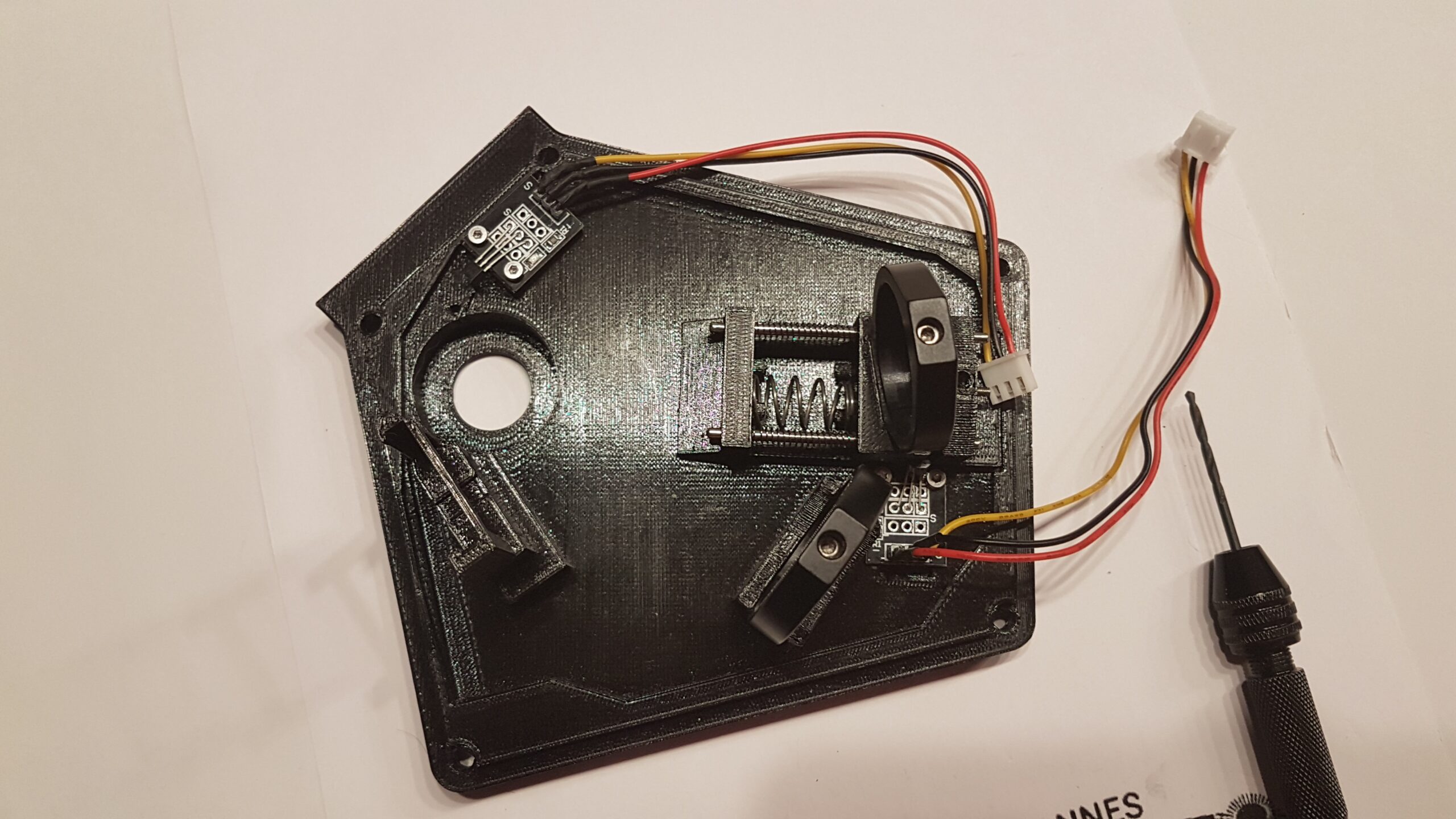
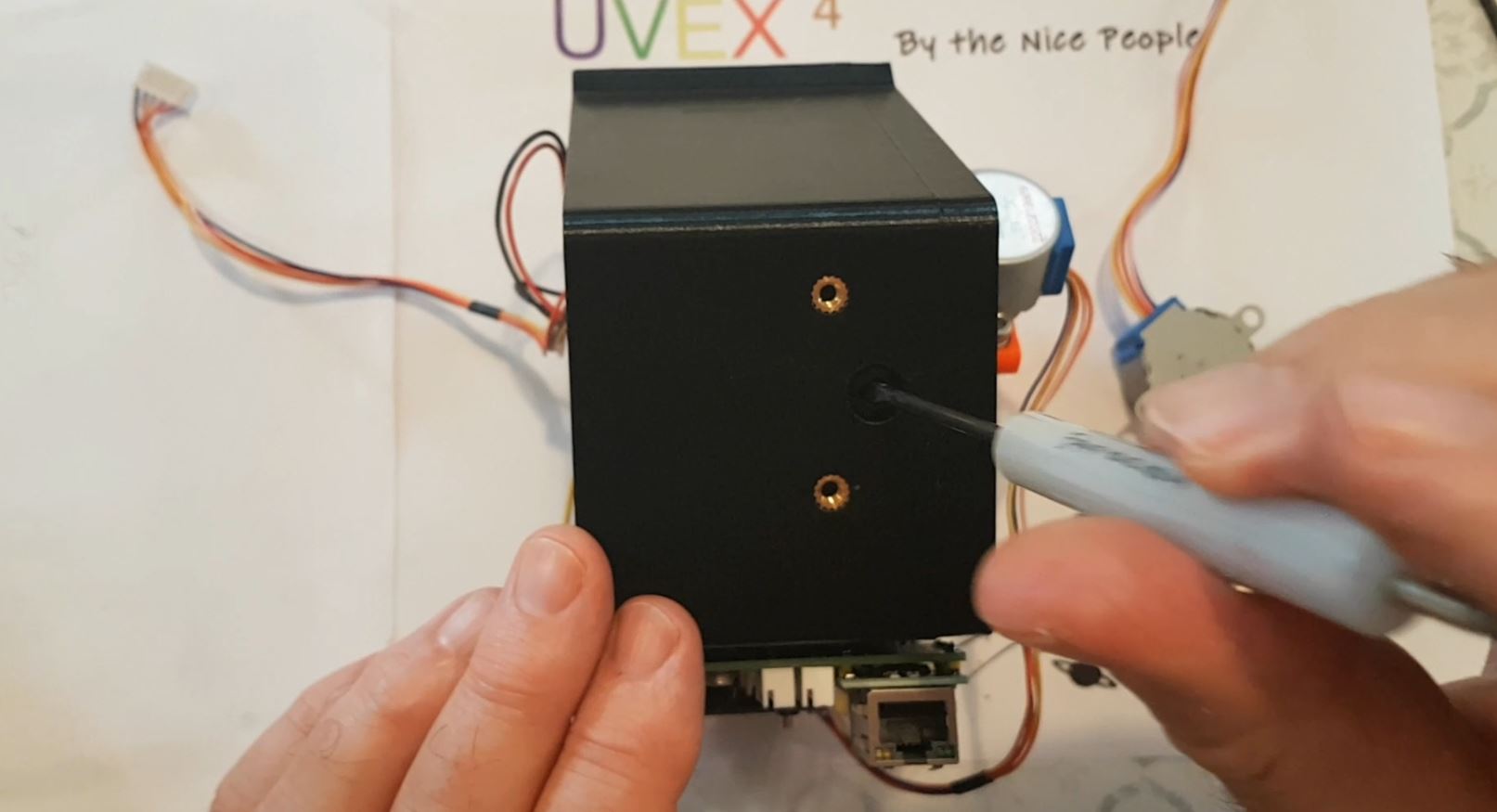
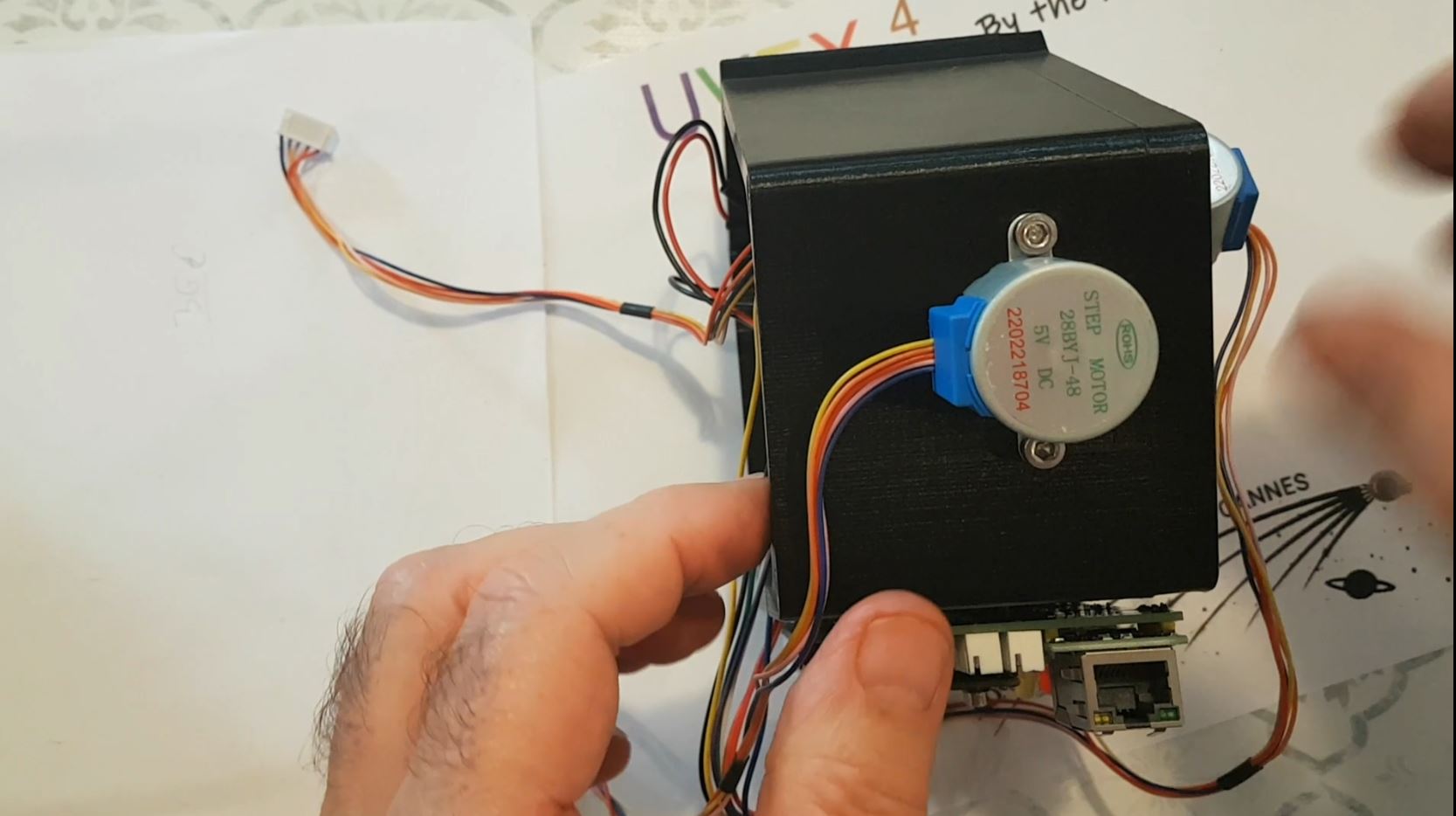
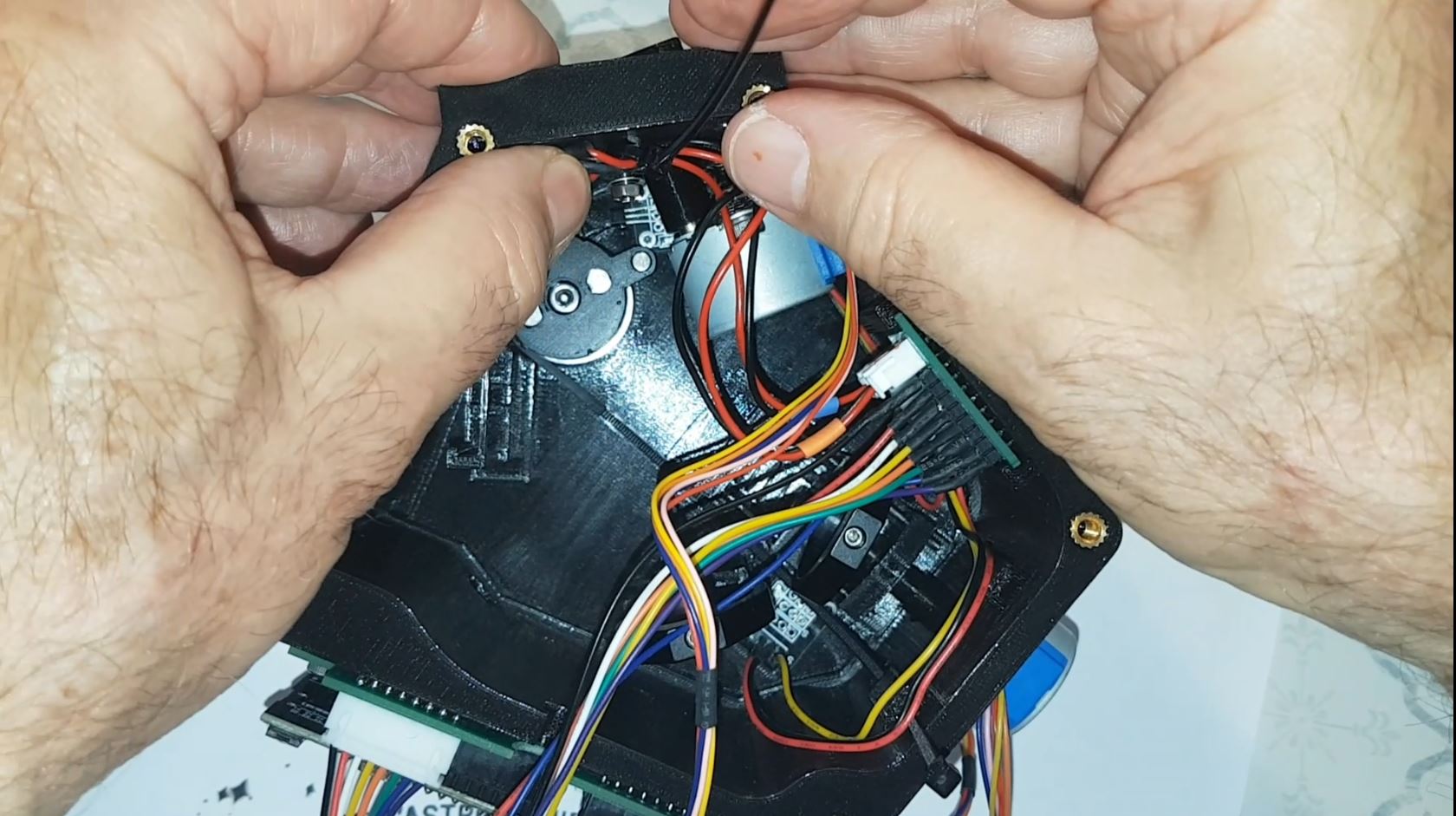
4. Tester capteur Hall, Installer les aimants de fin de course dans le bon sens
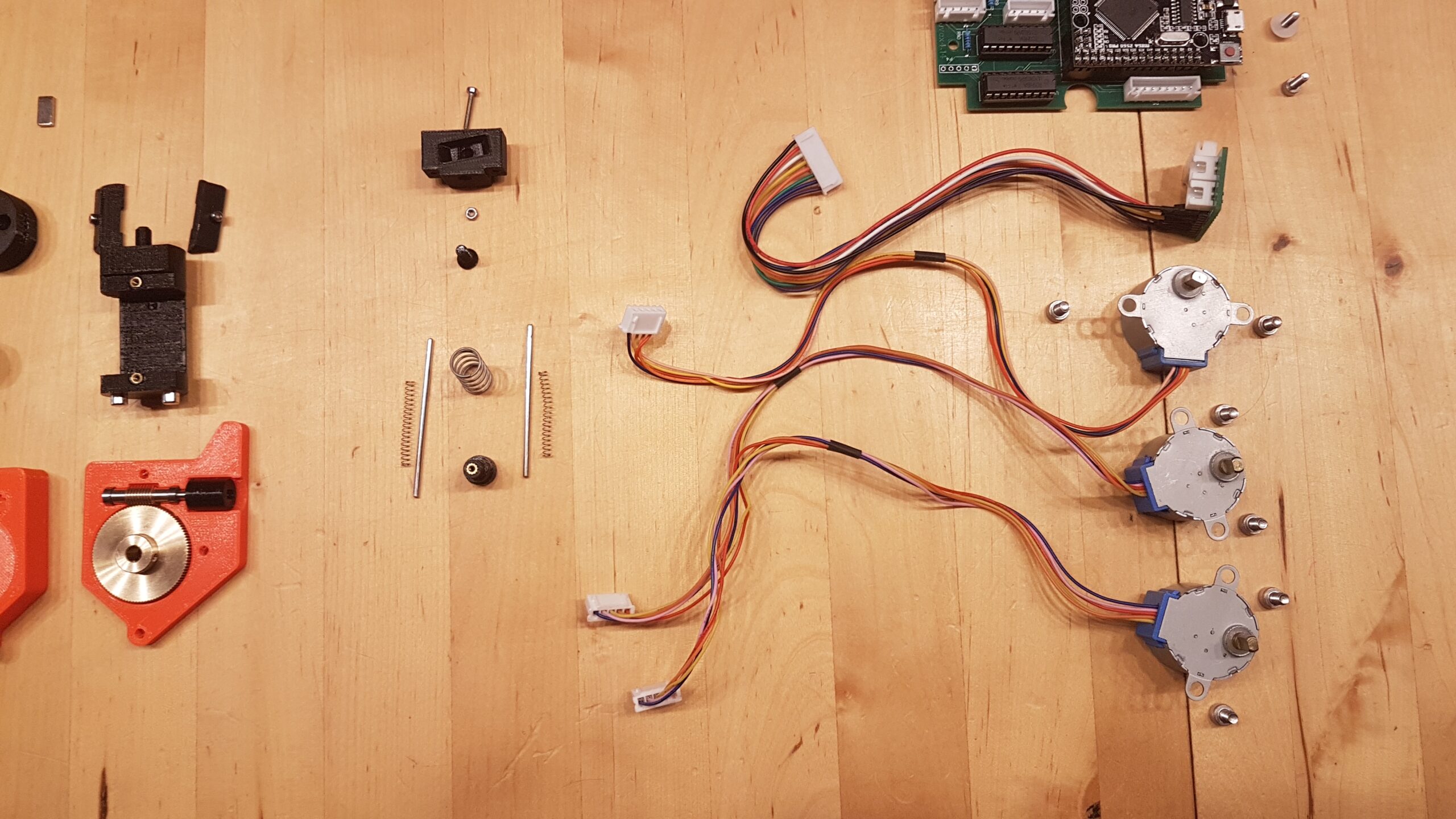
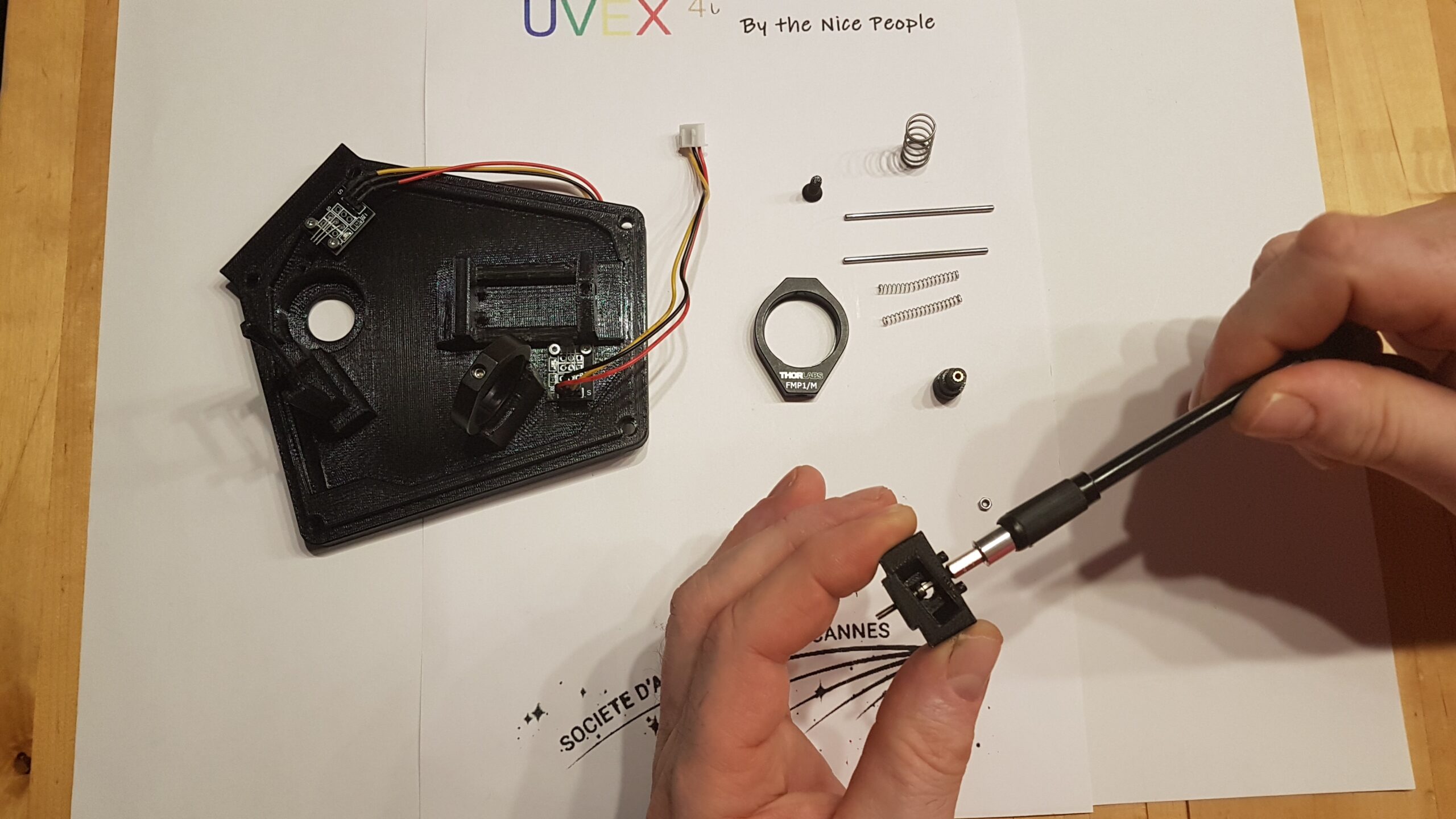
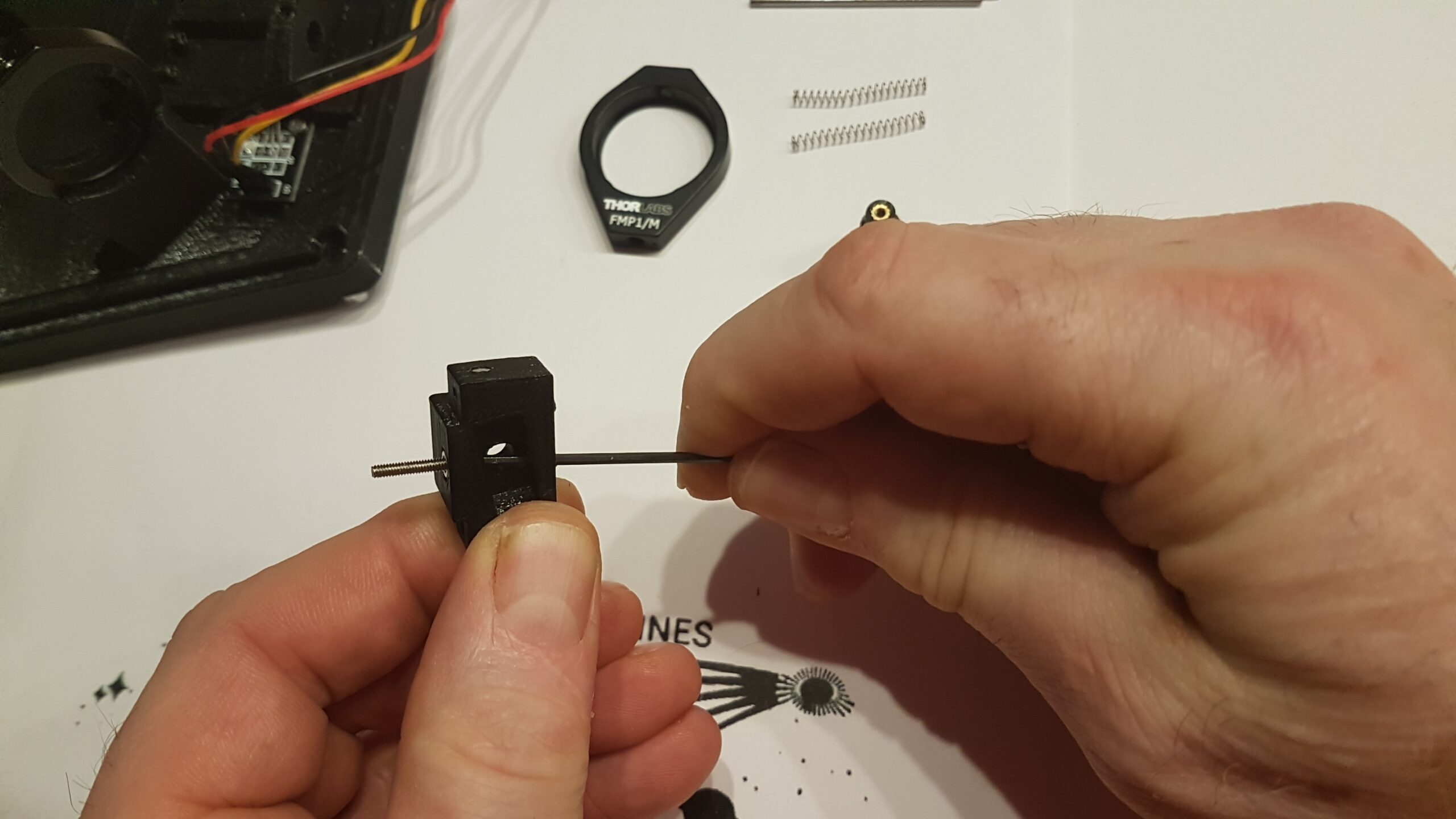
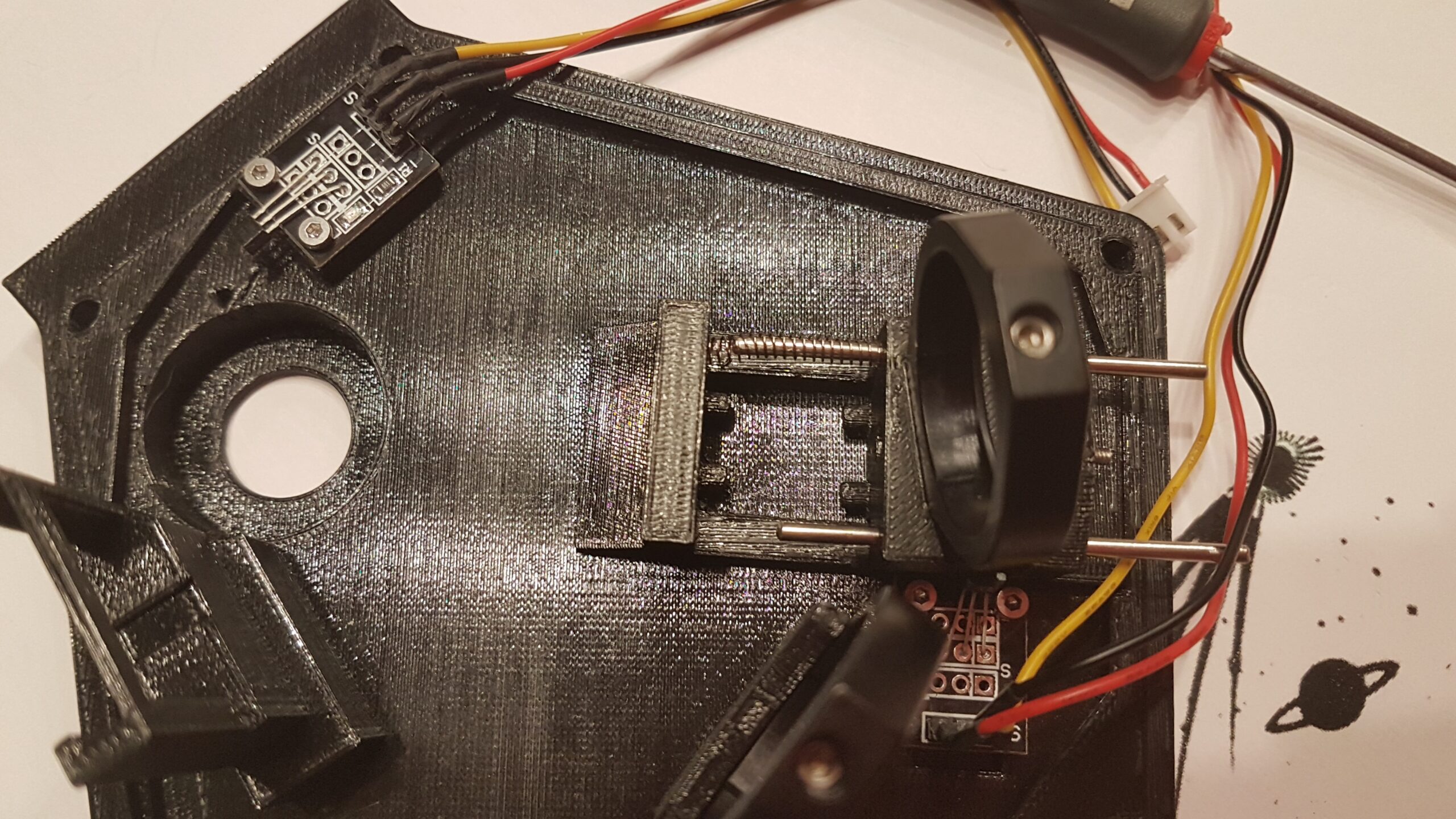
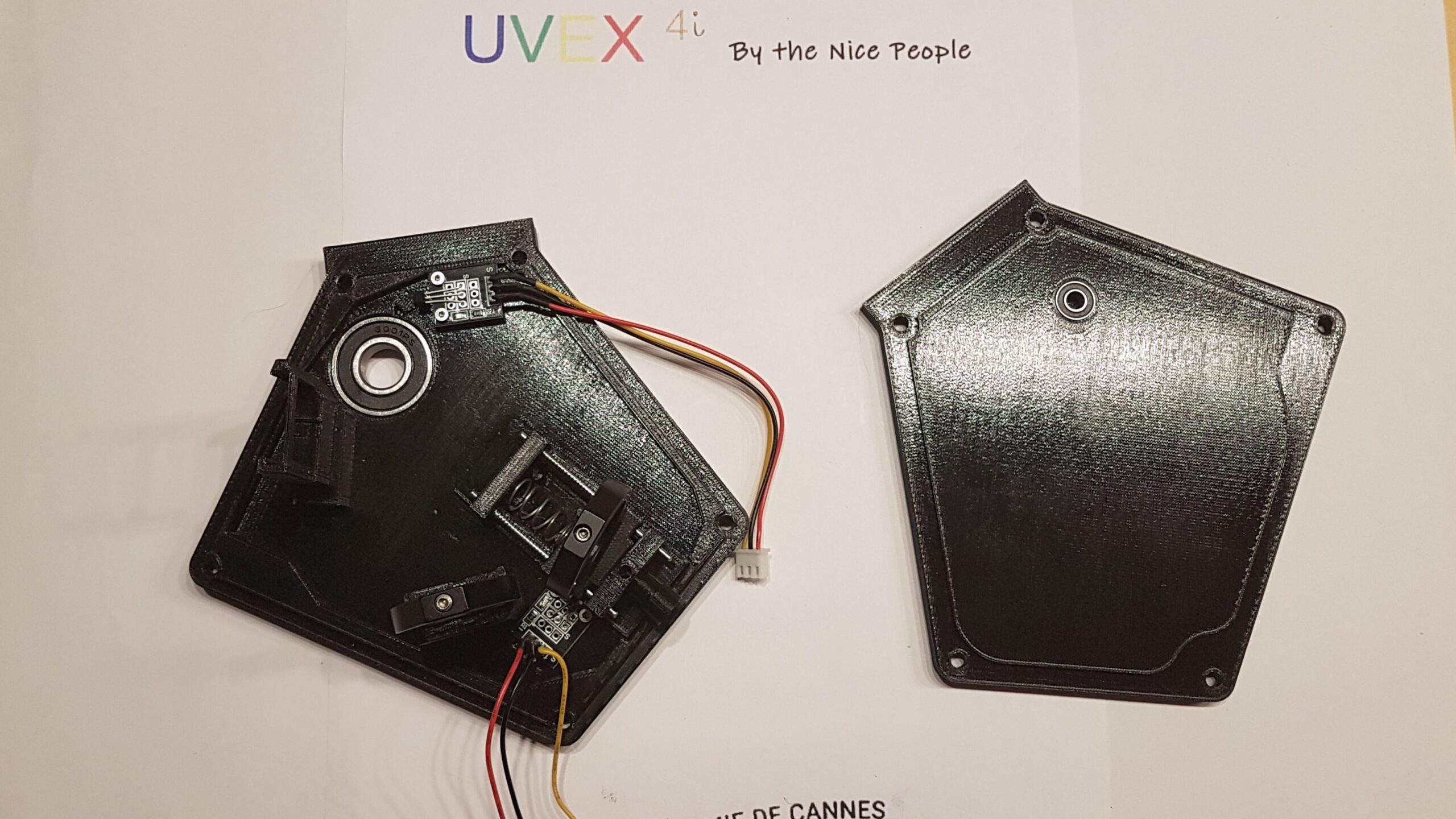
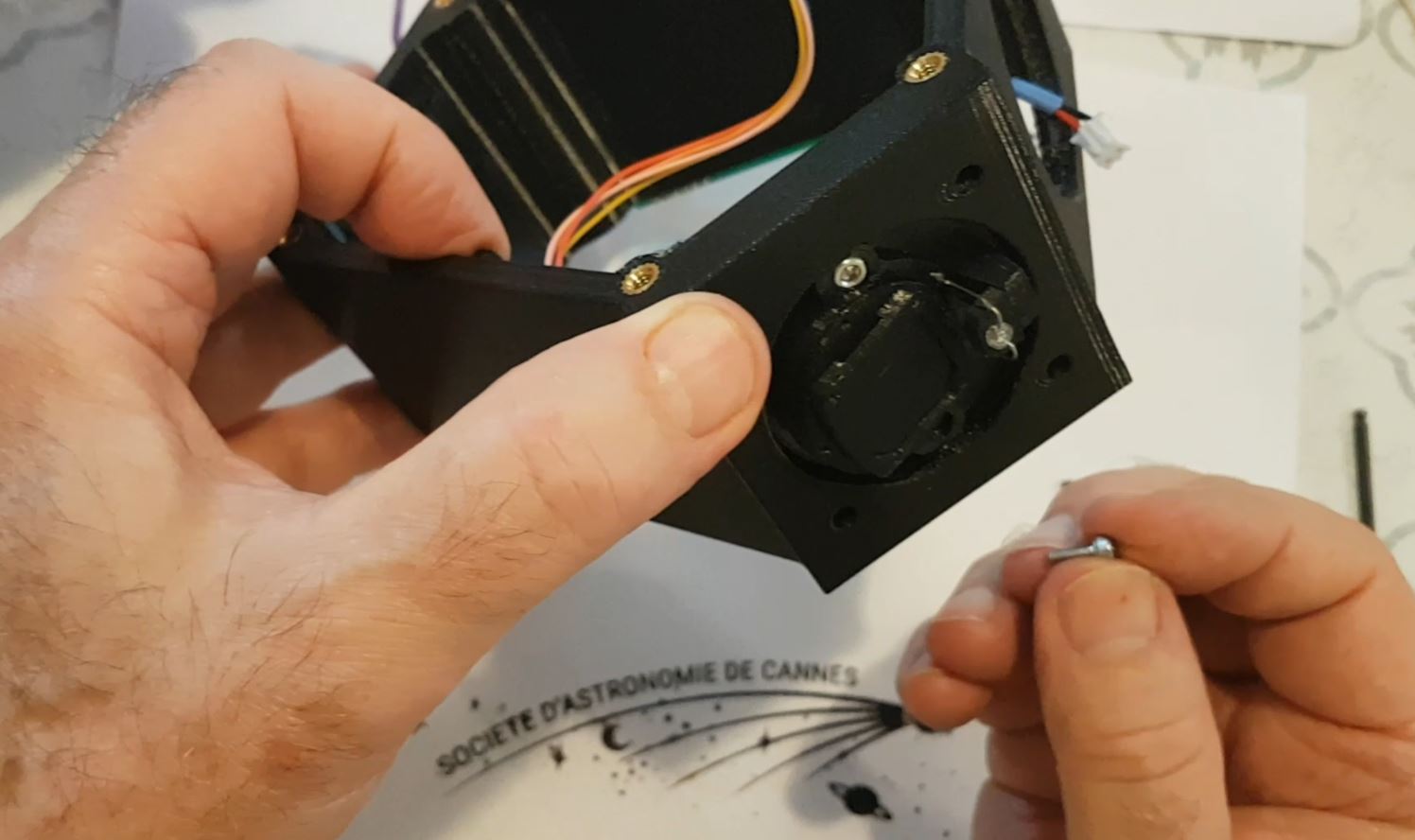
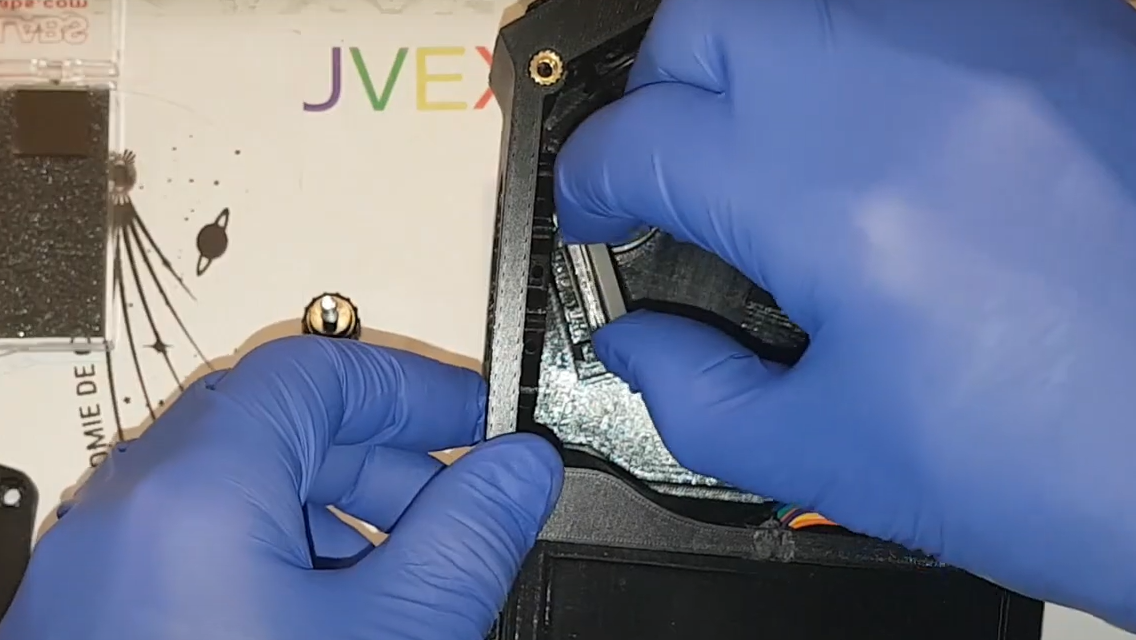
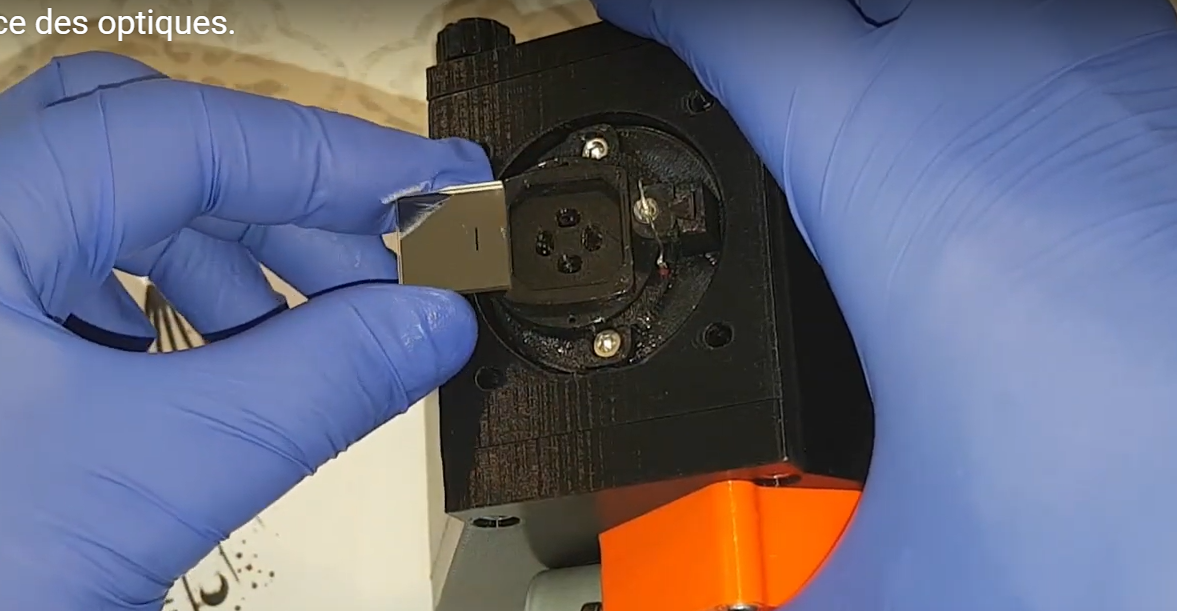
Le test des capteurs à effet Hall consiste vérifier l’action d’un aimant sur les 2 capteurs. La LED rouge des capteurs ST054 doit s’allumer lorsqu’on approche une des faces de l’aimant de fin de course. On en profite pour positionner les aimants de fin de course dans le bon sens, dans leur logement.
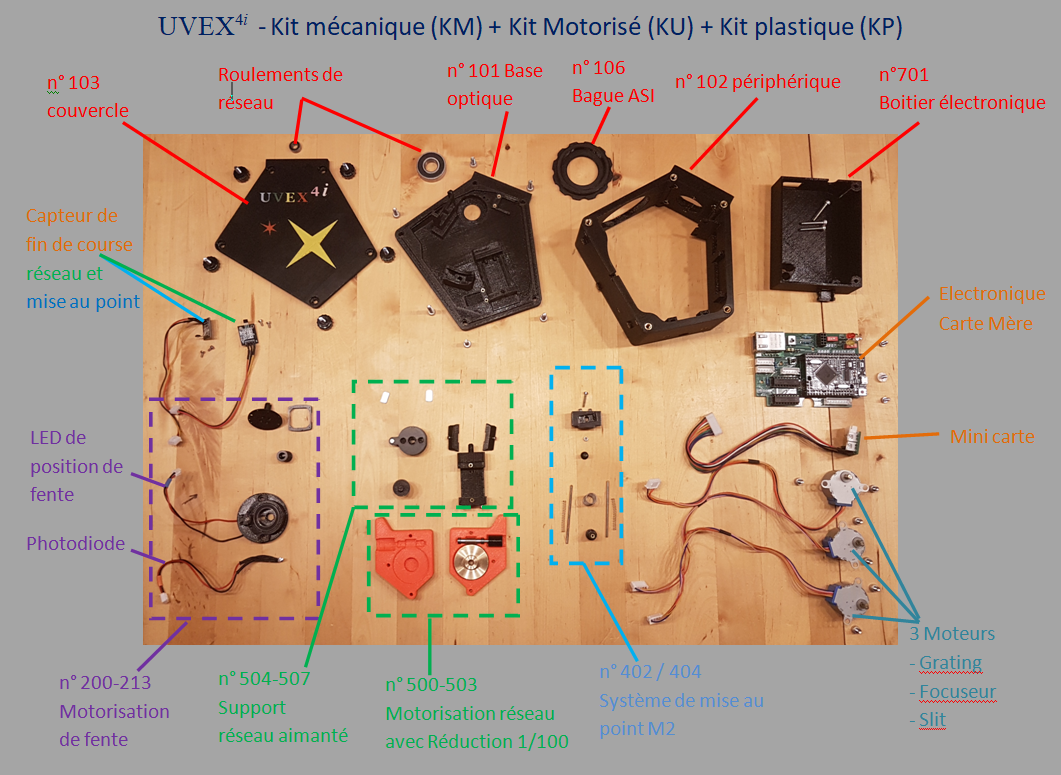
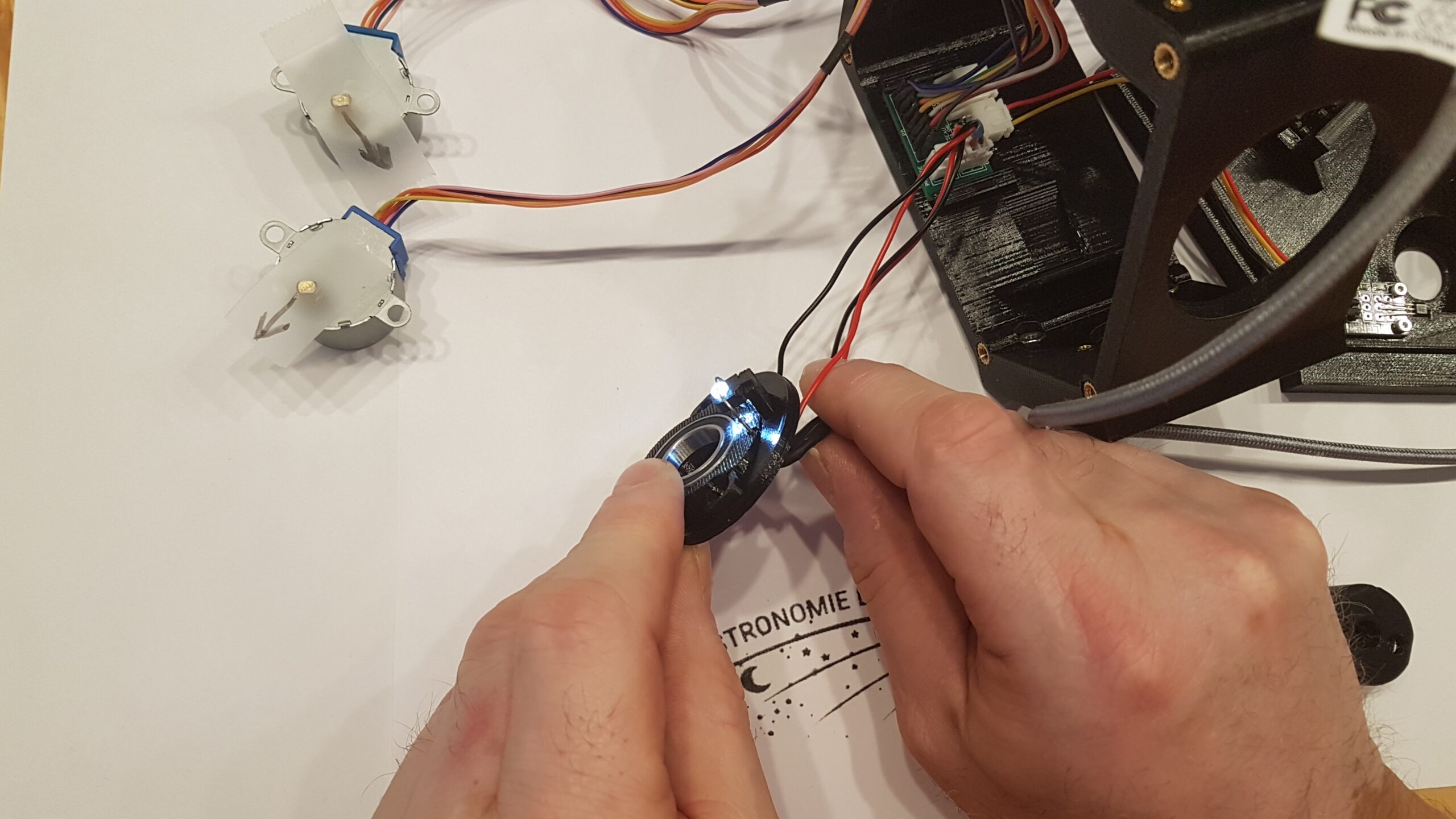
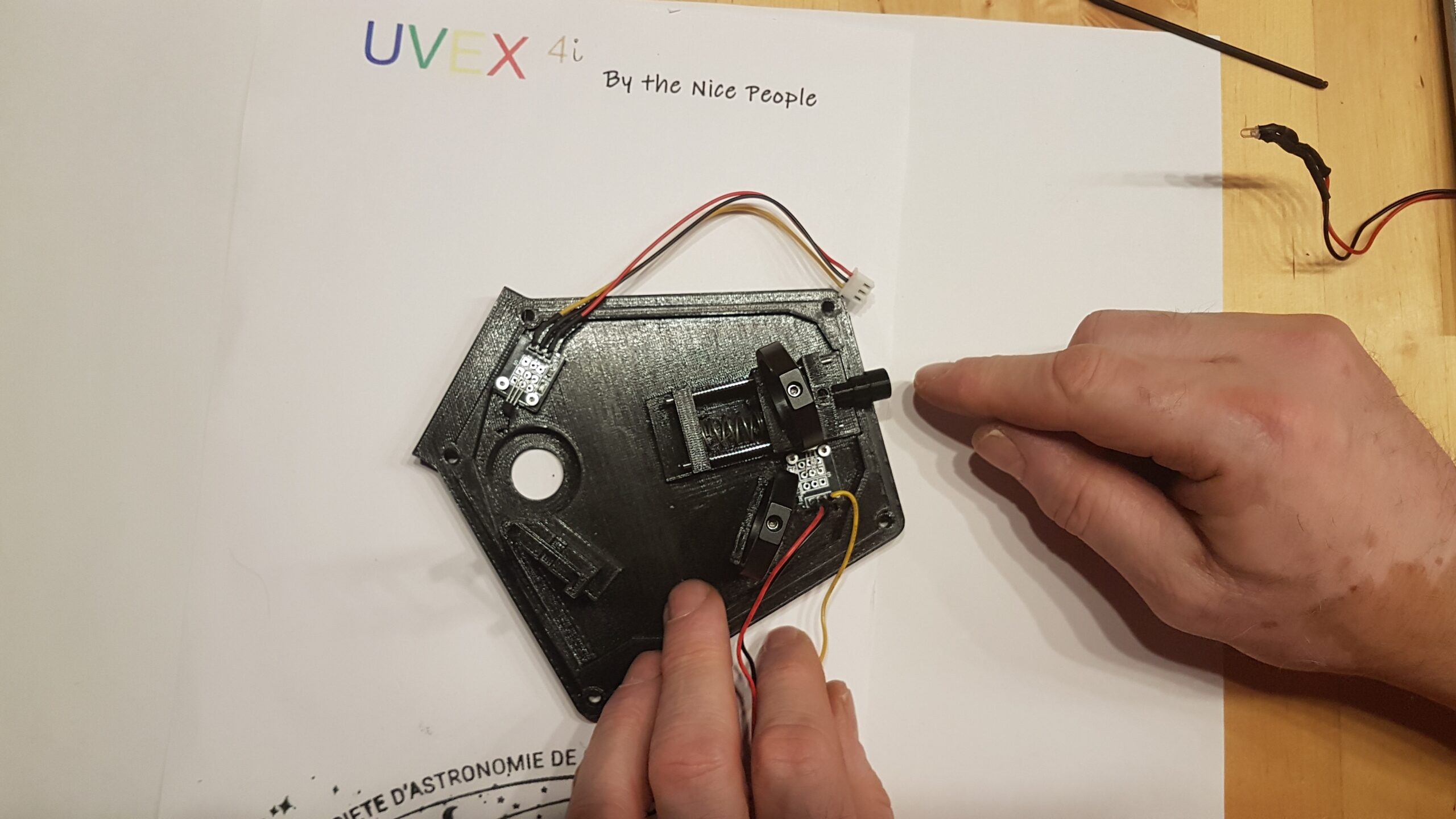
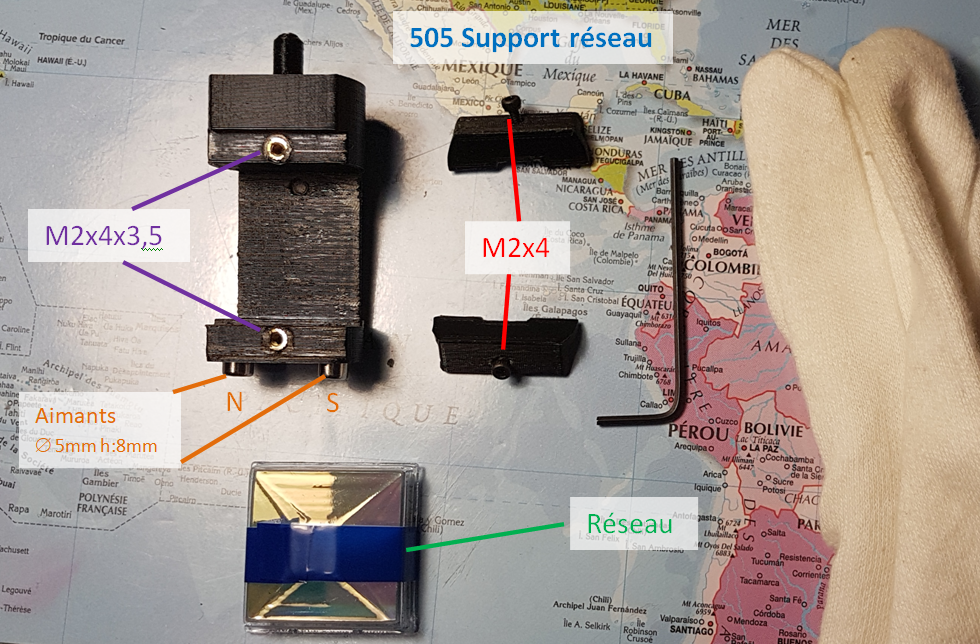
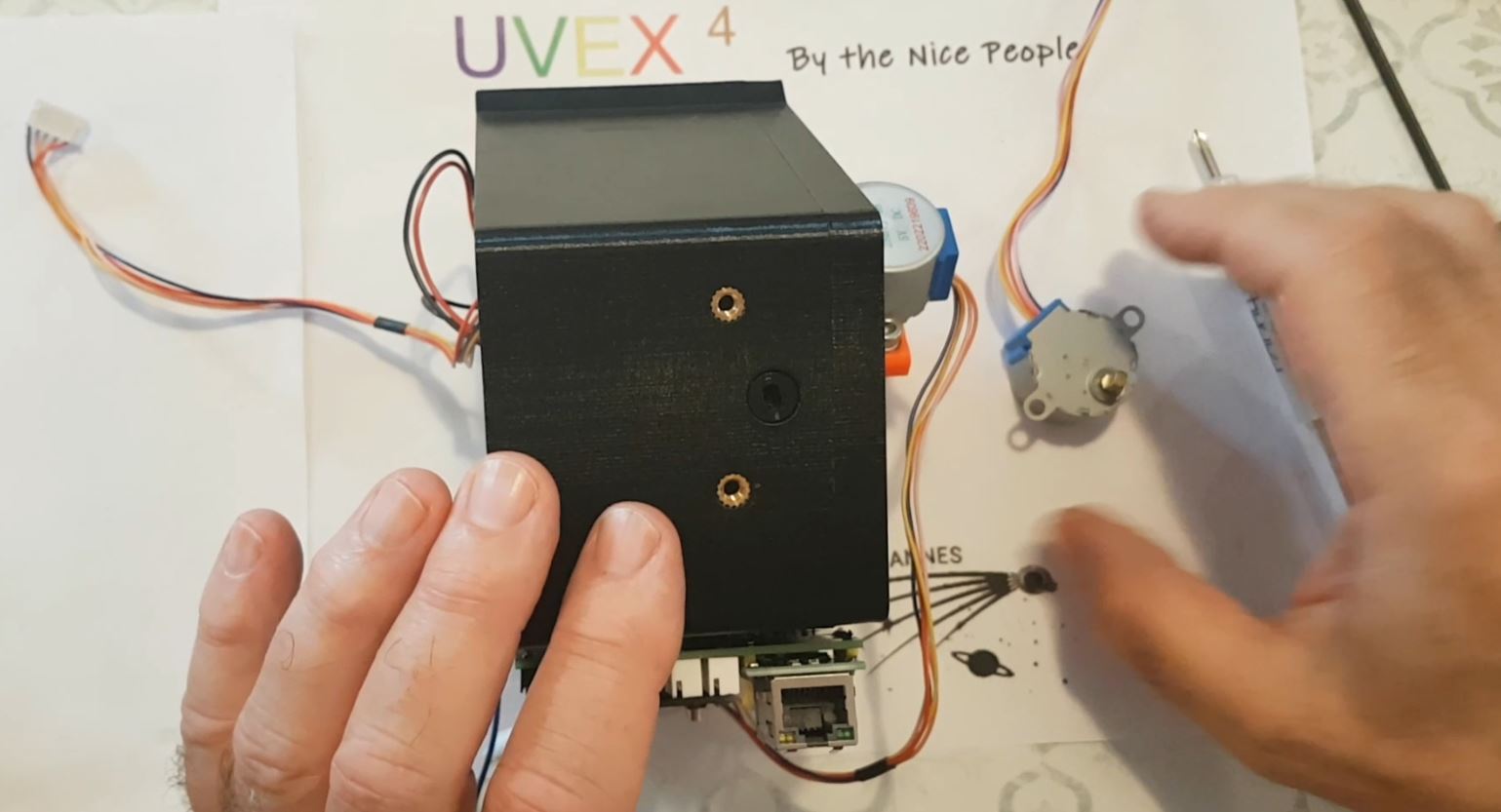
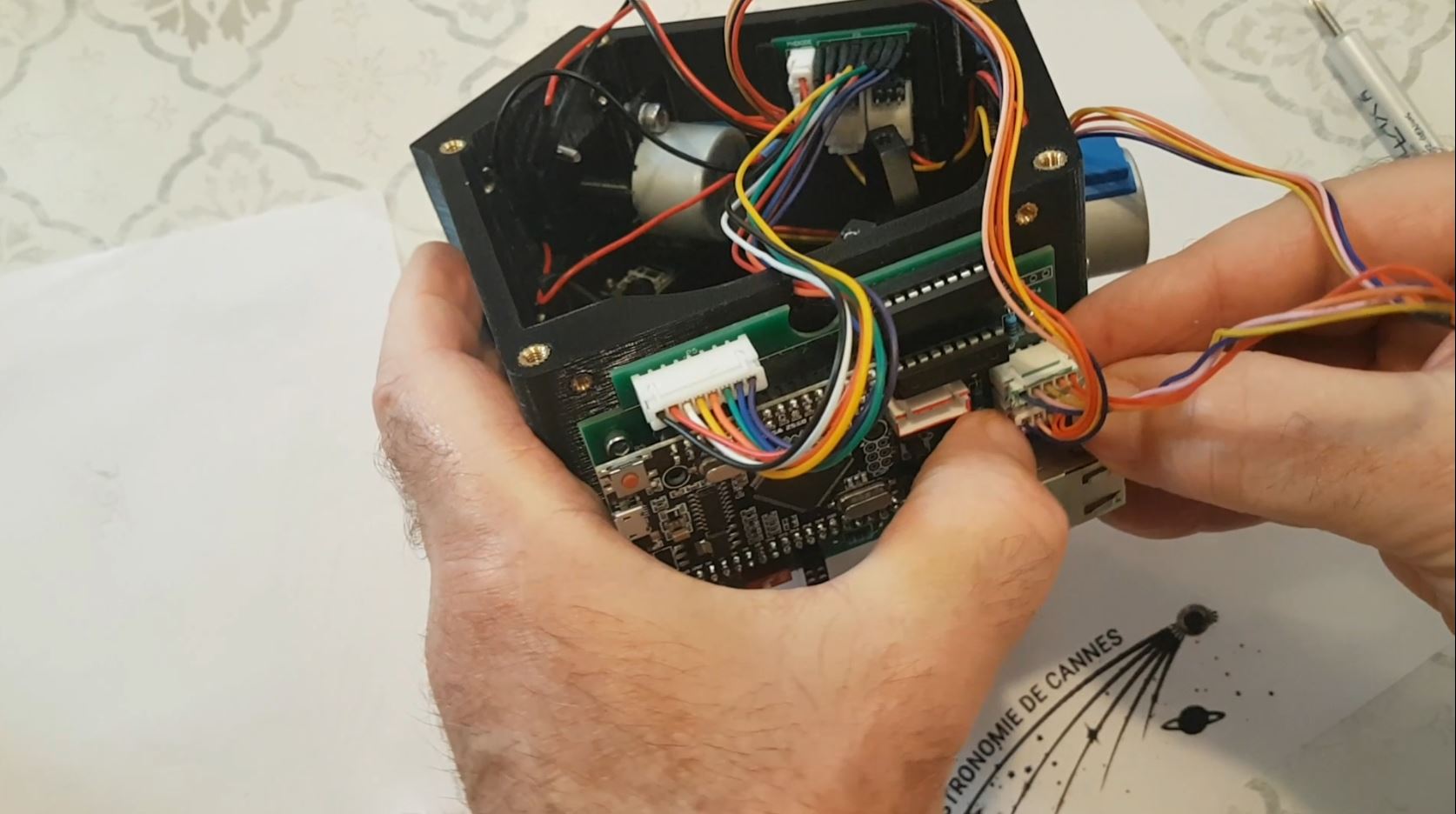
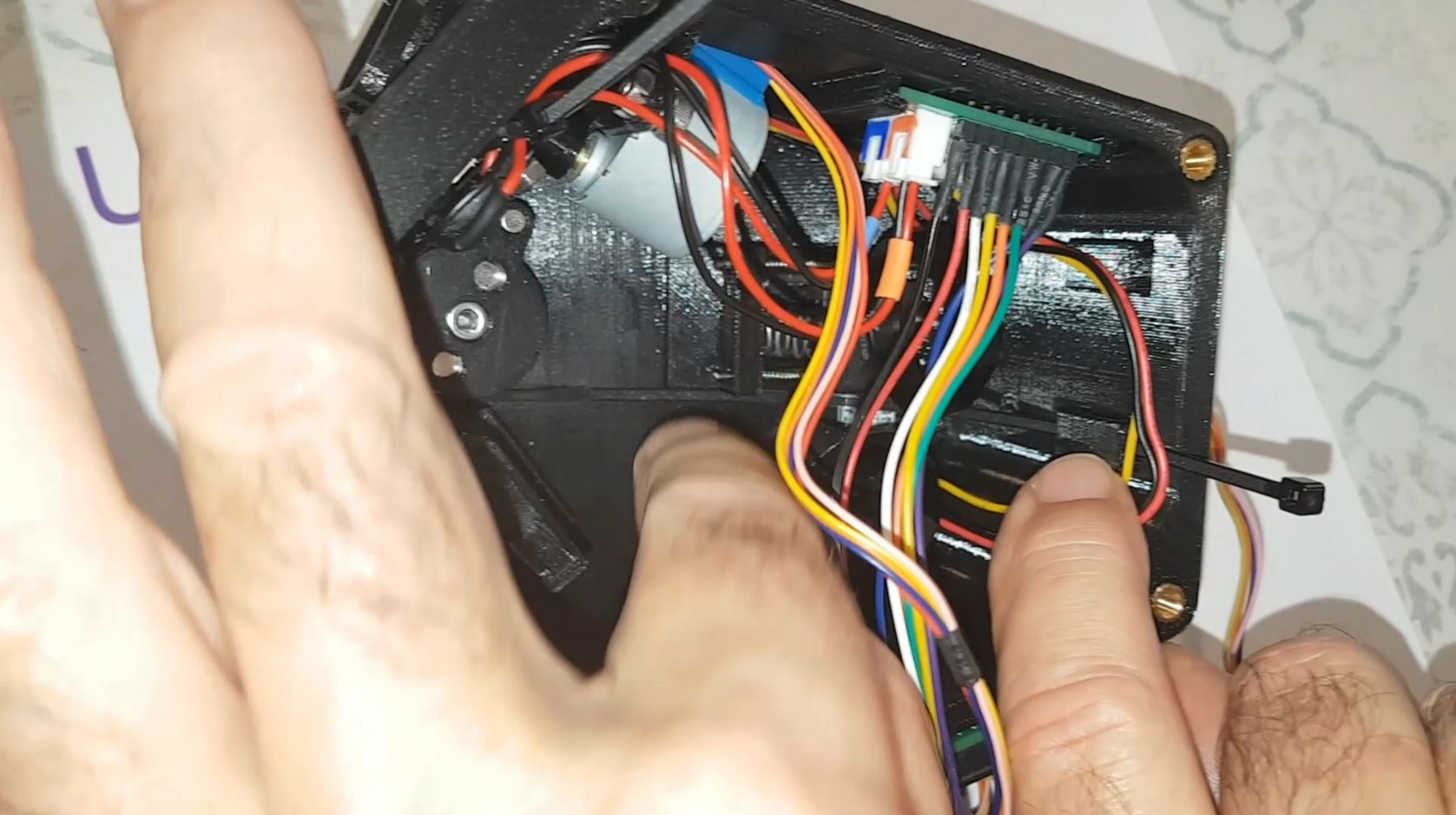
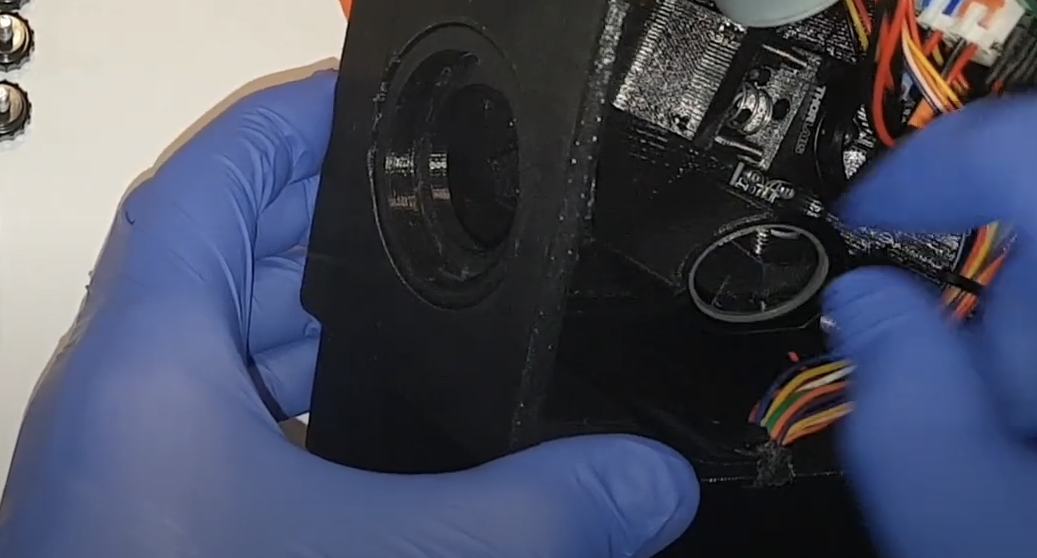
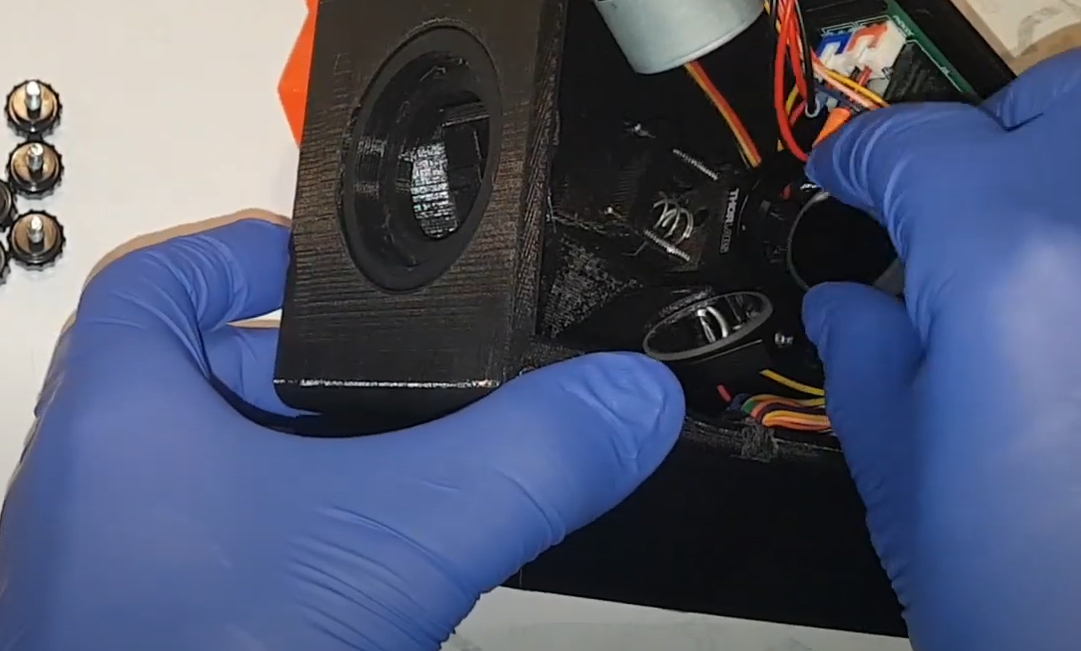
a- l’aimant de fin de course réseau dans la pièce plastique 504_base_reseau.stl….
passer le bout du bras, aimant visible, par dessus le capteur, le LED rouge doit s’allumer
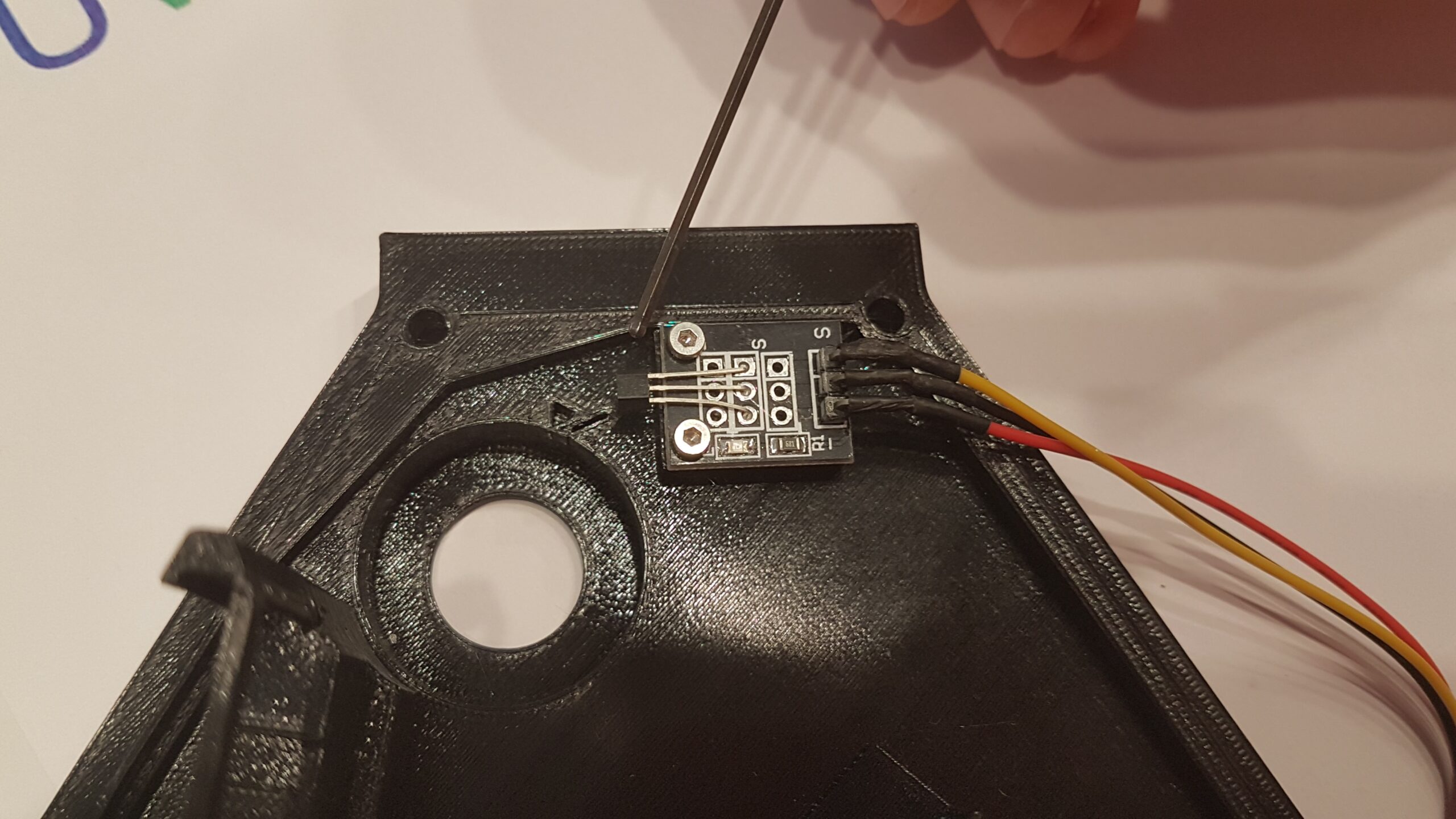
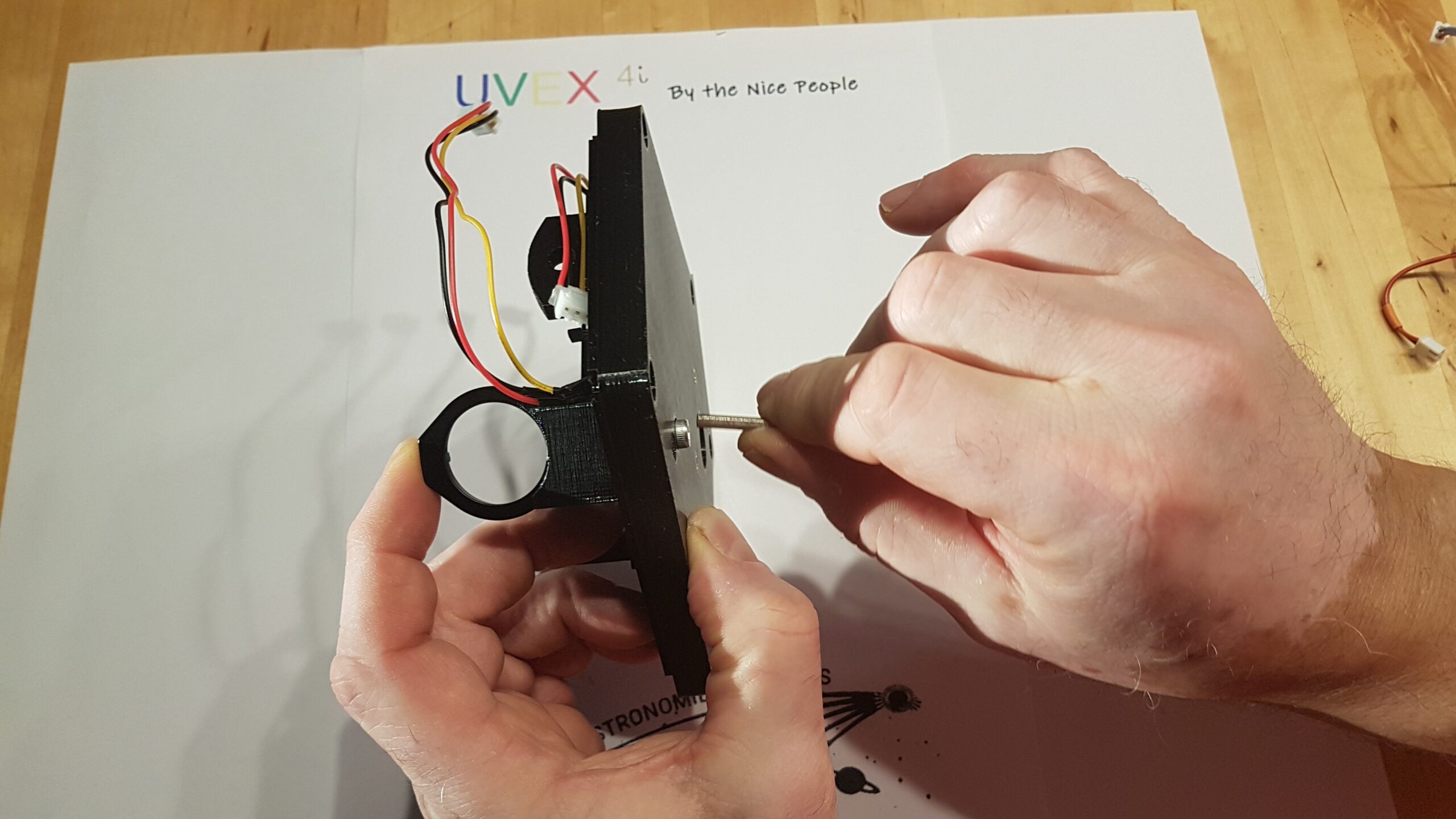
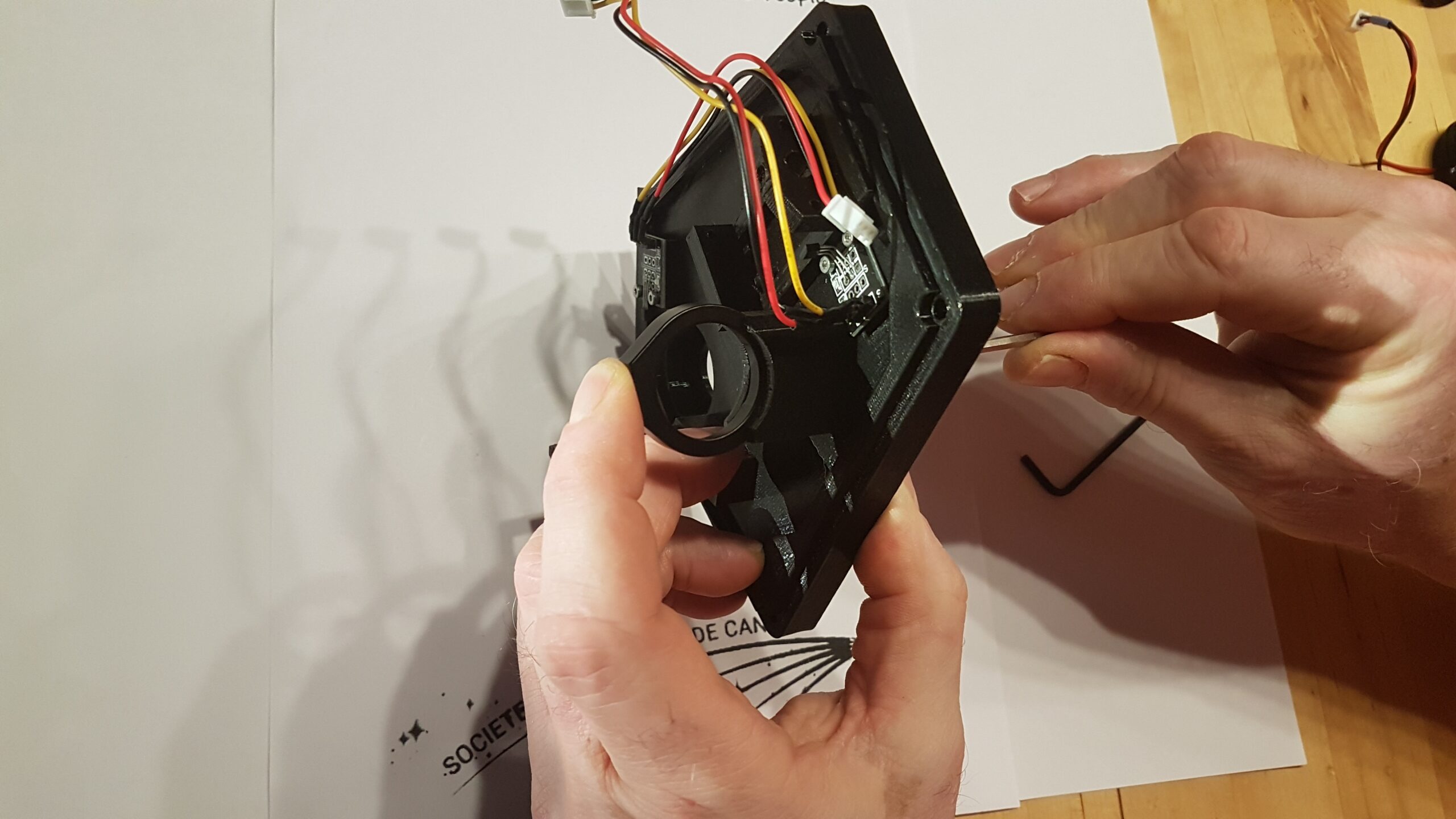
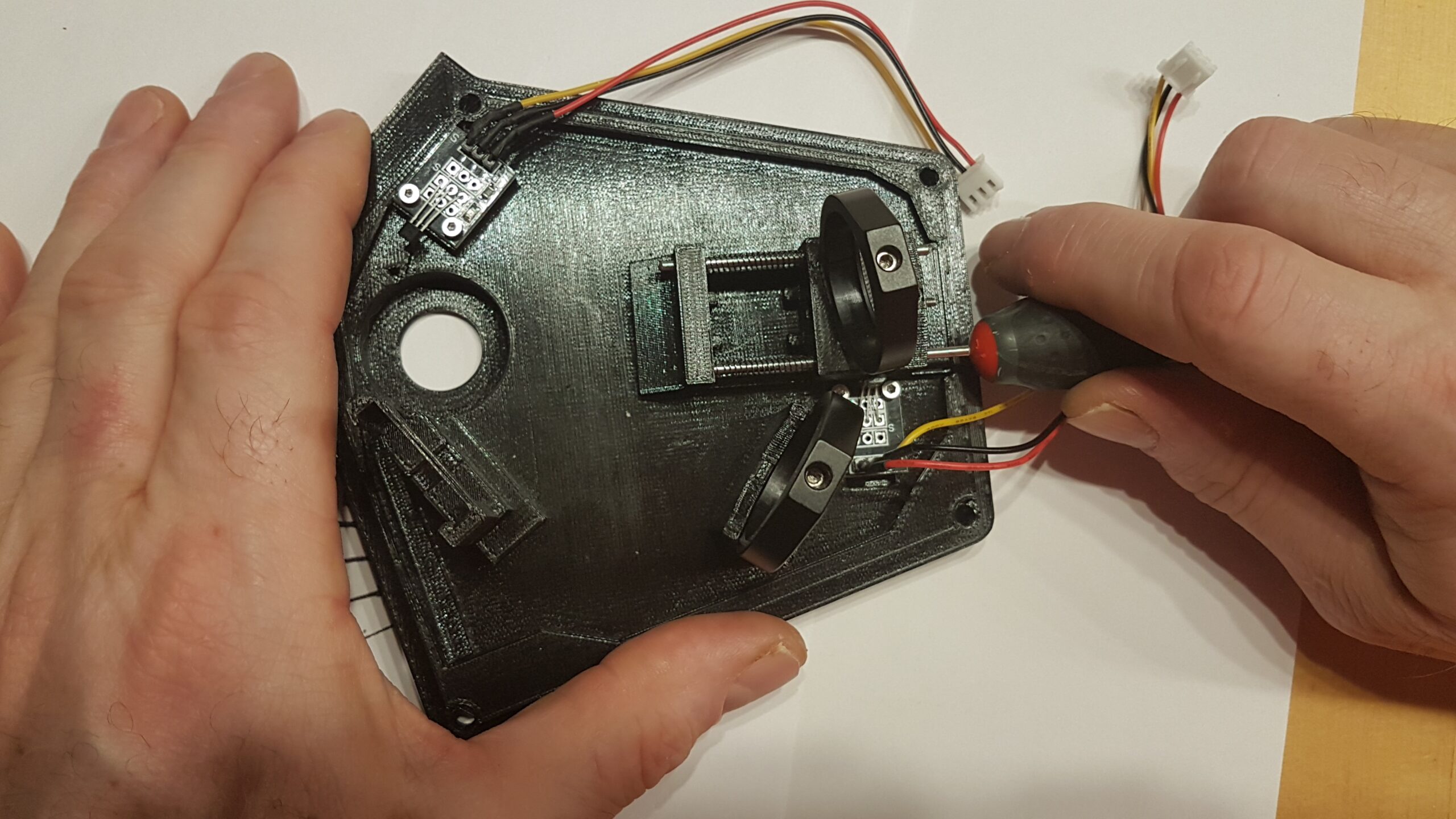
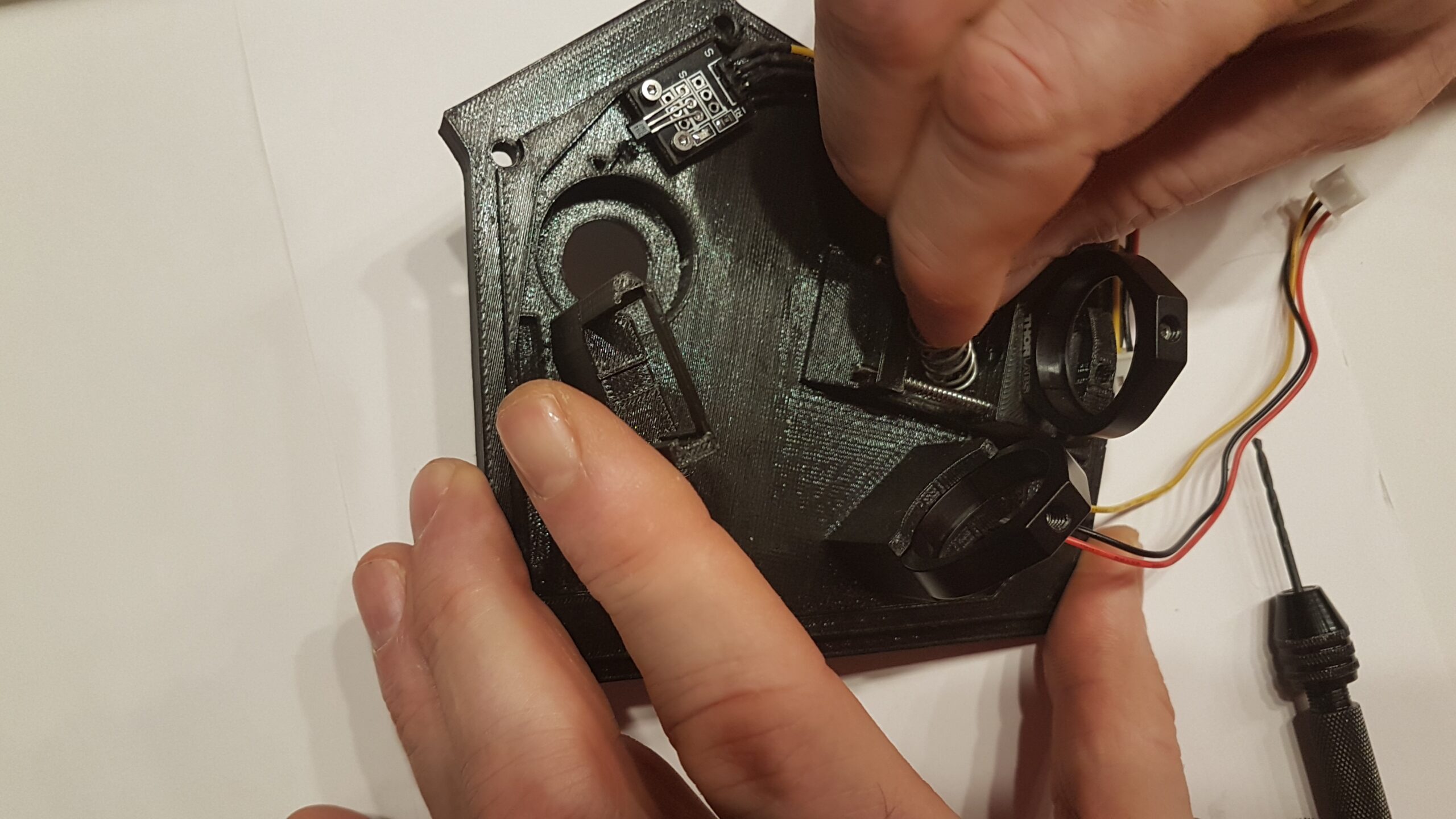
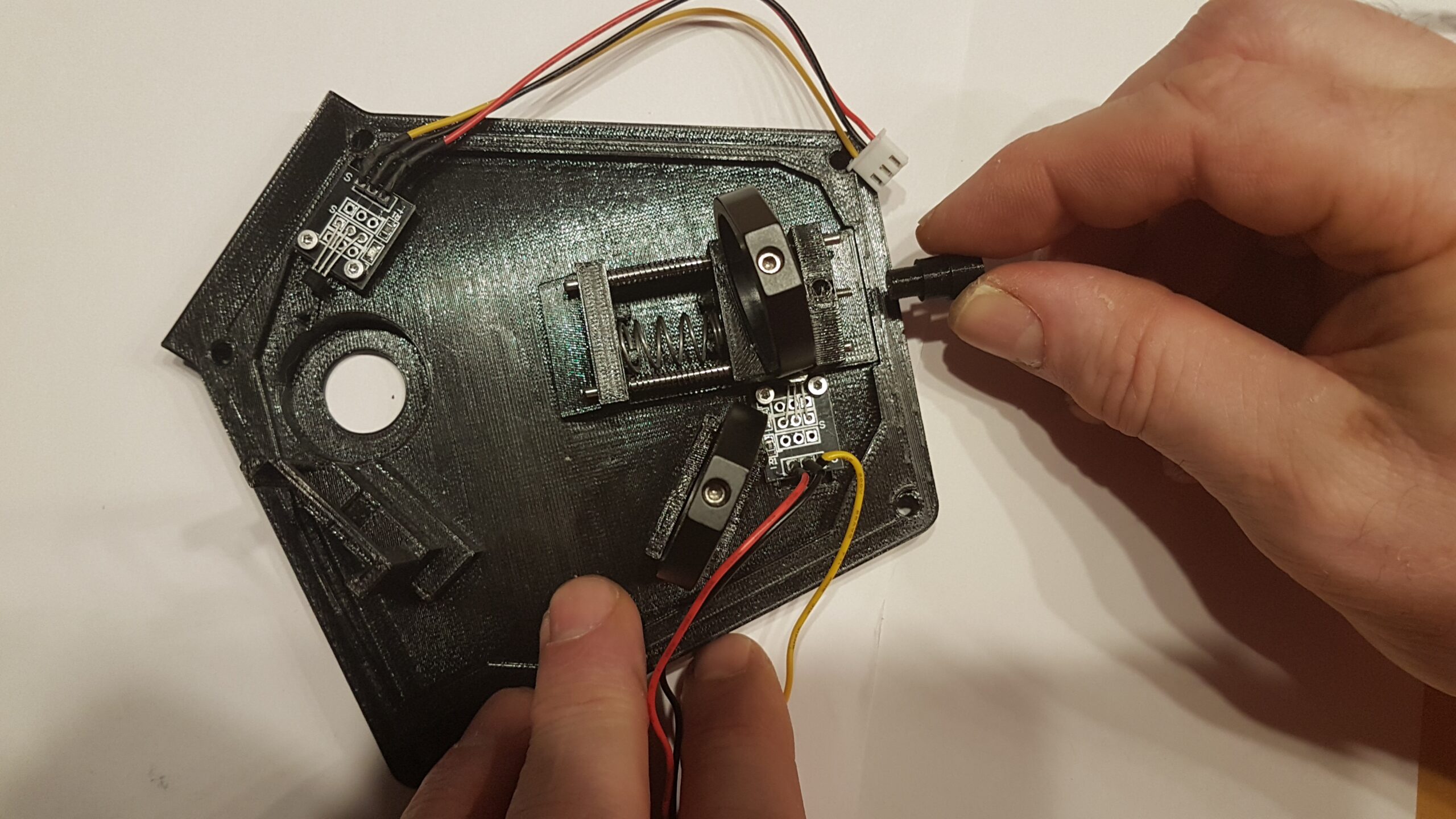
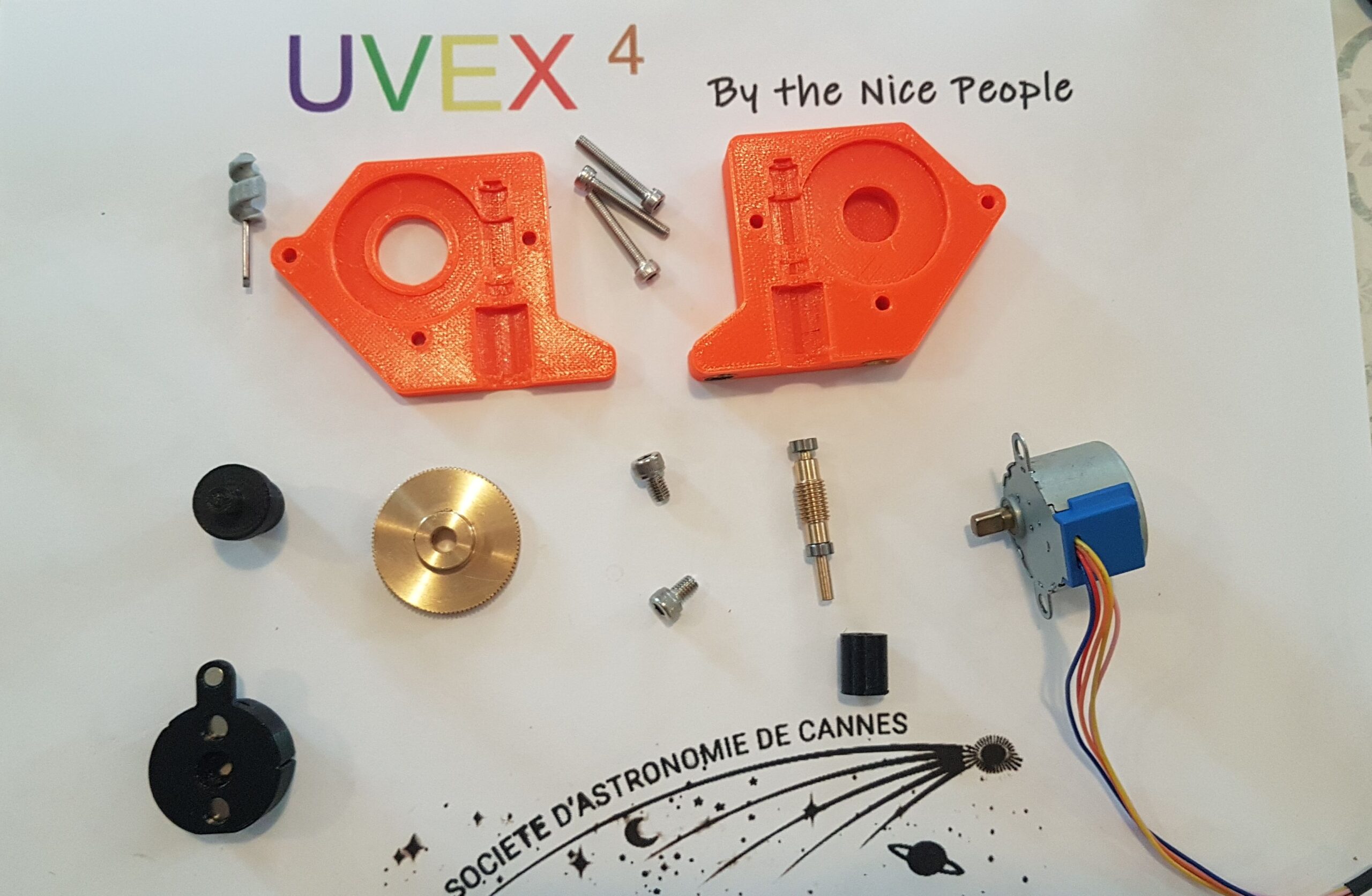
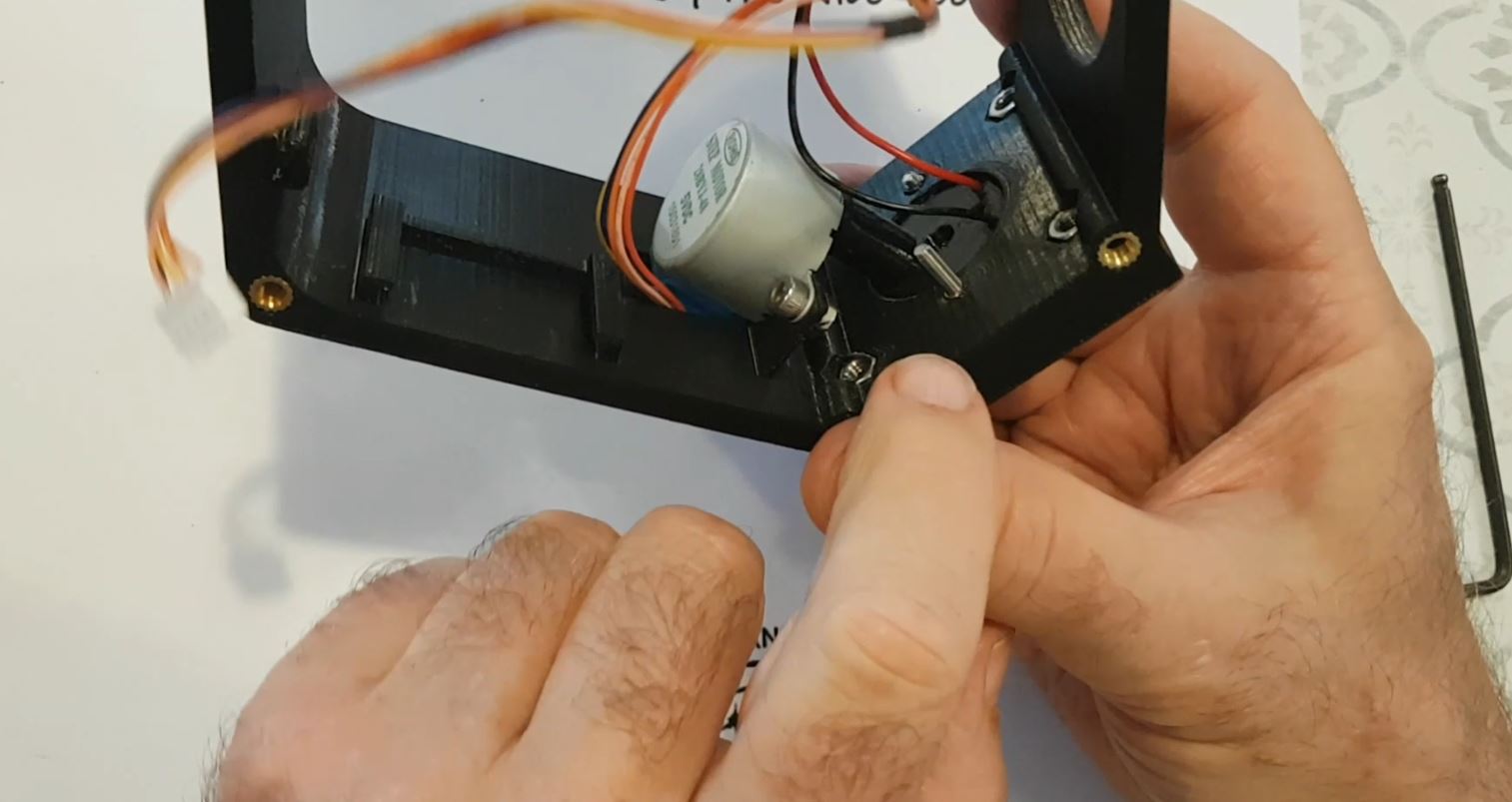
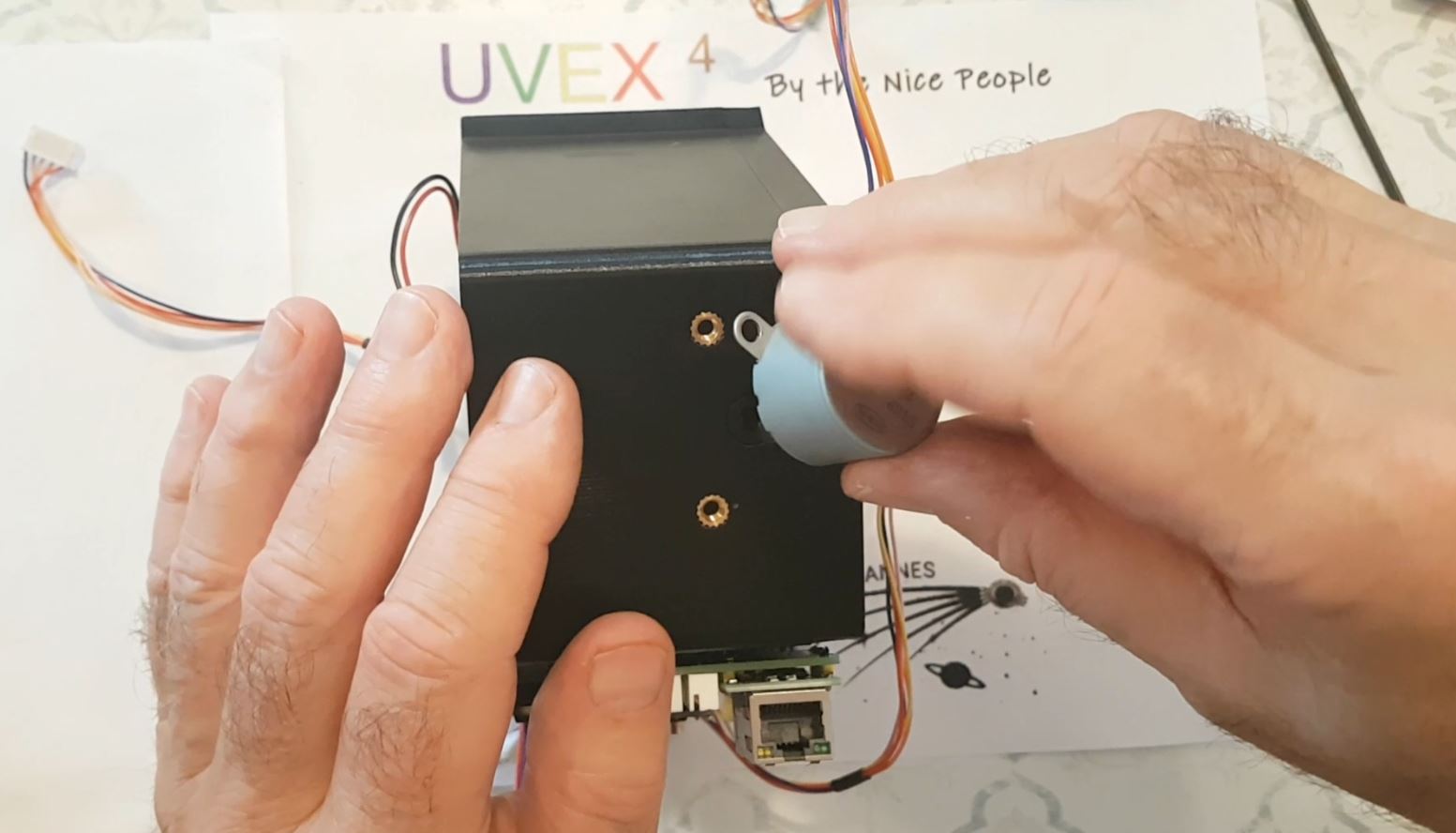
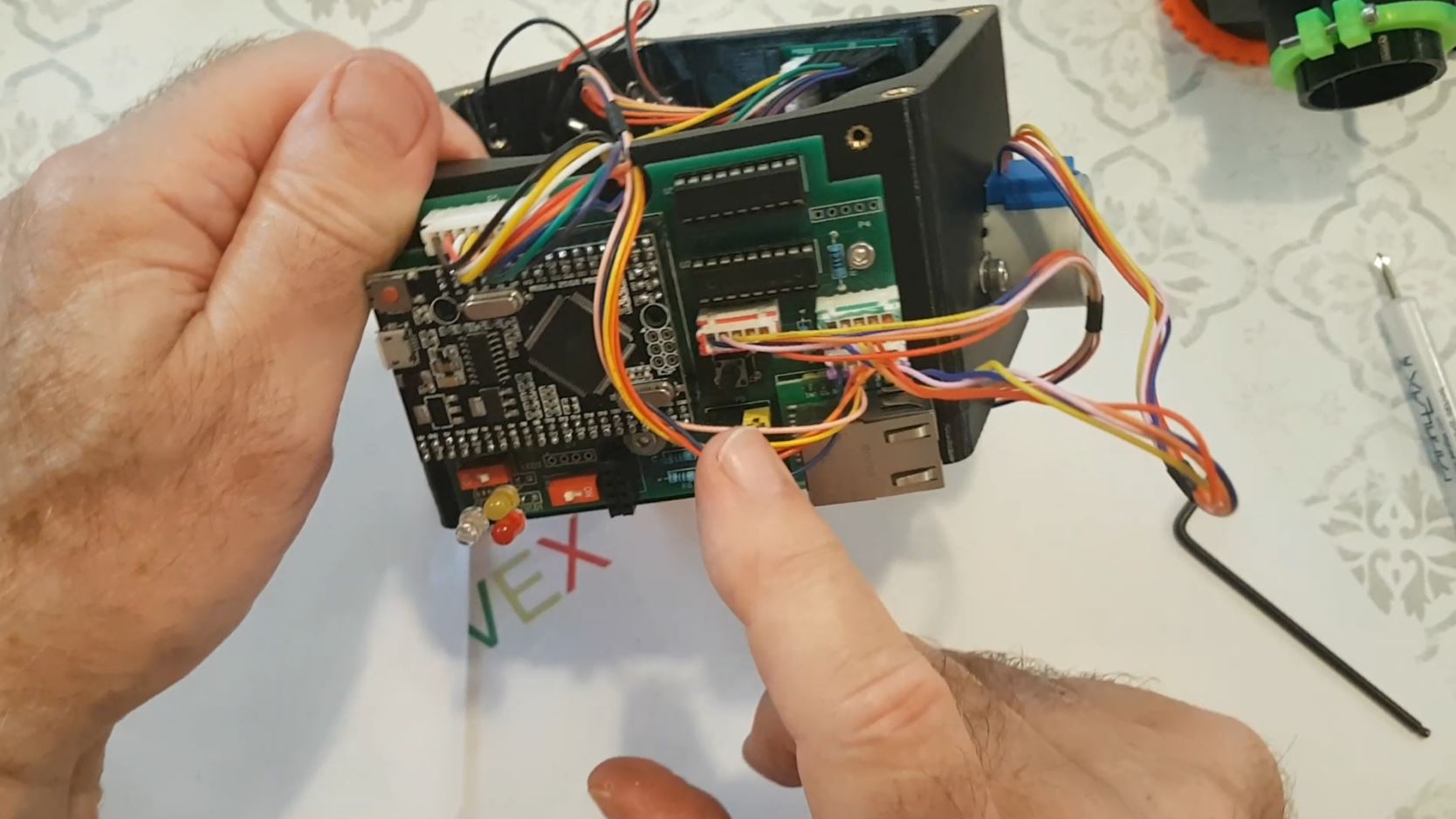
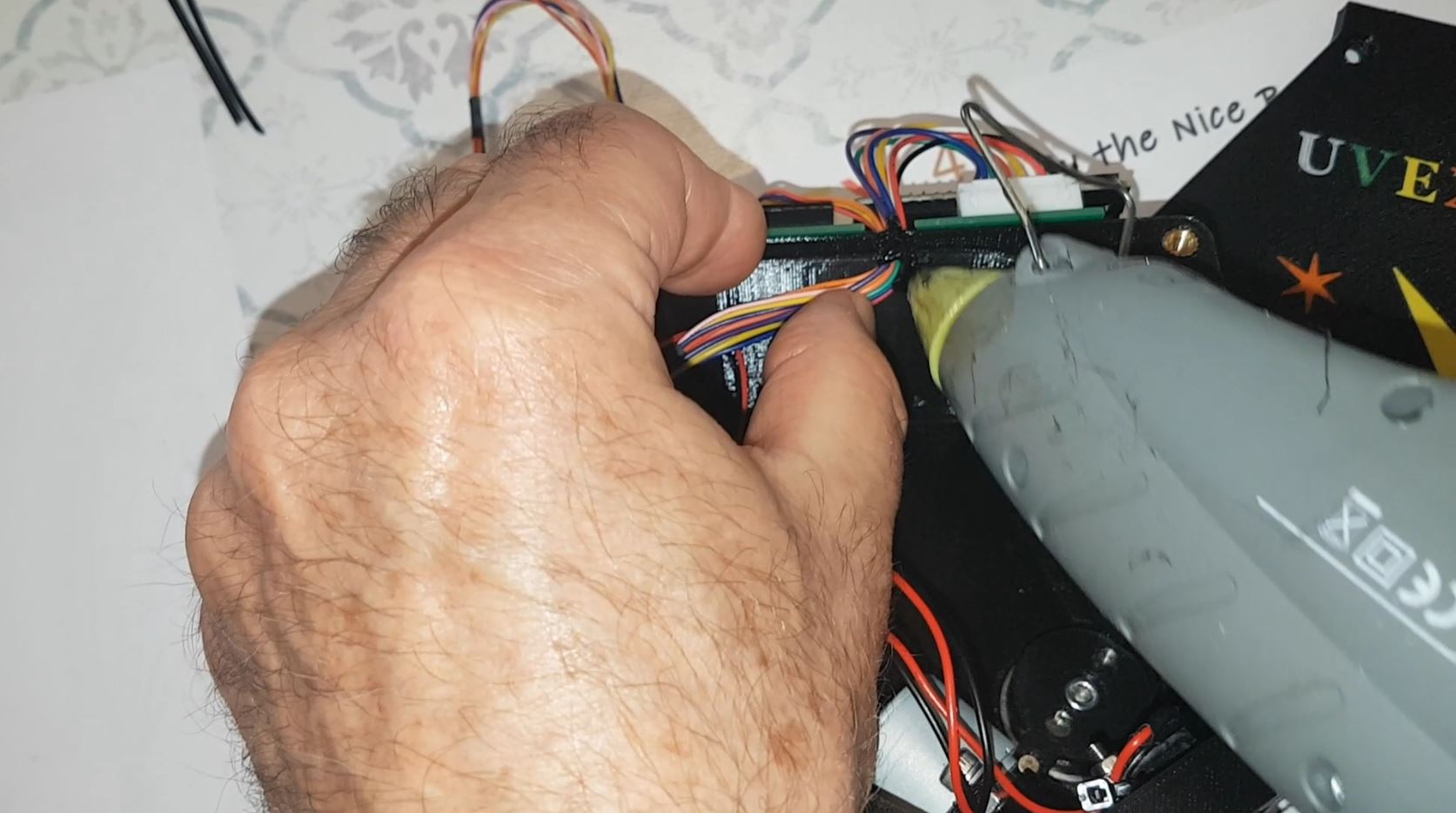
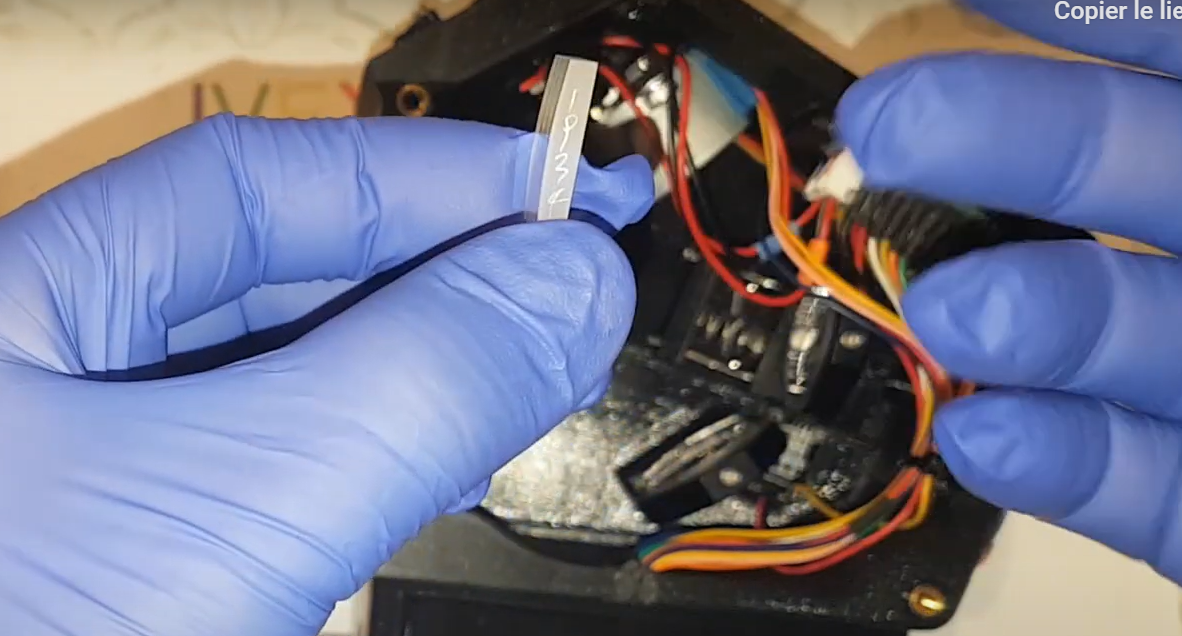
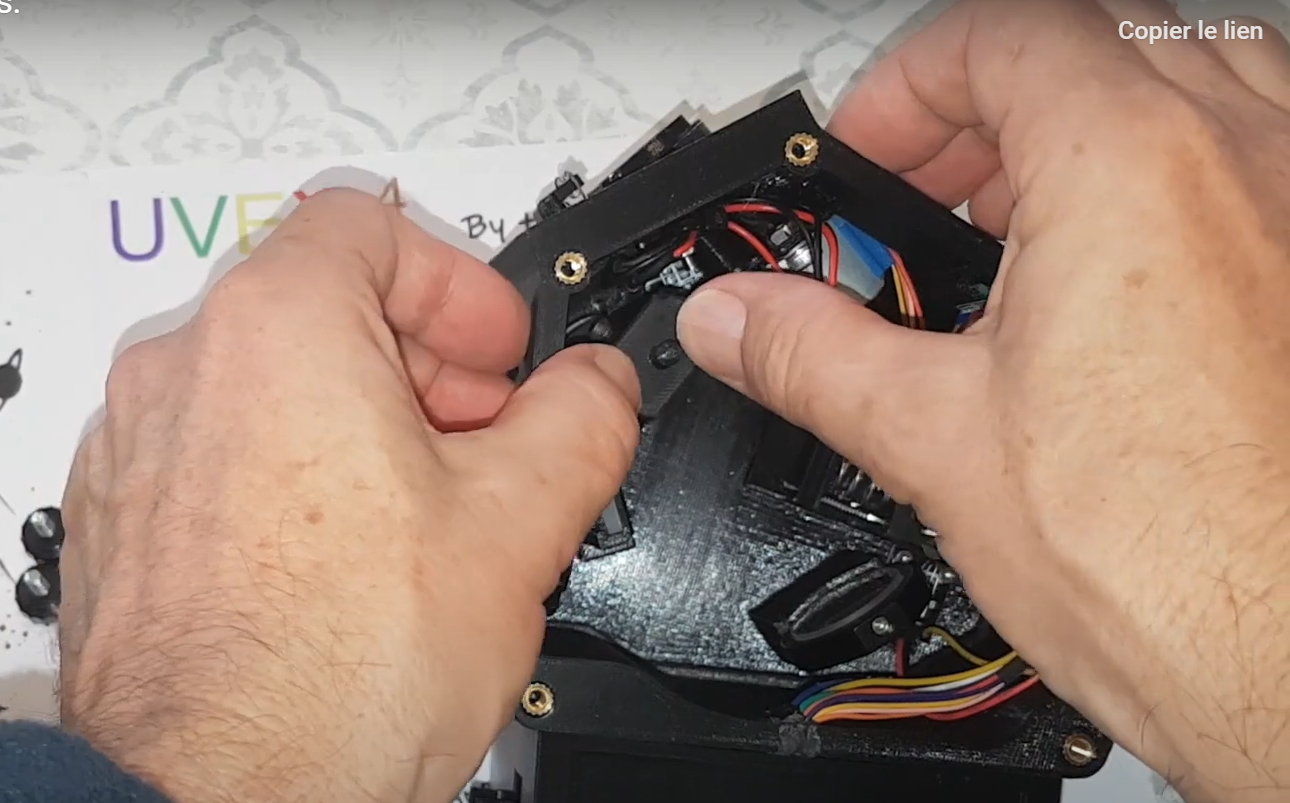
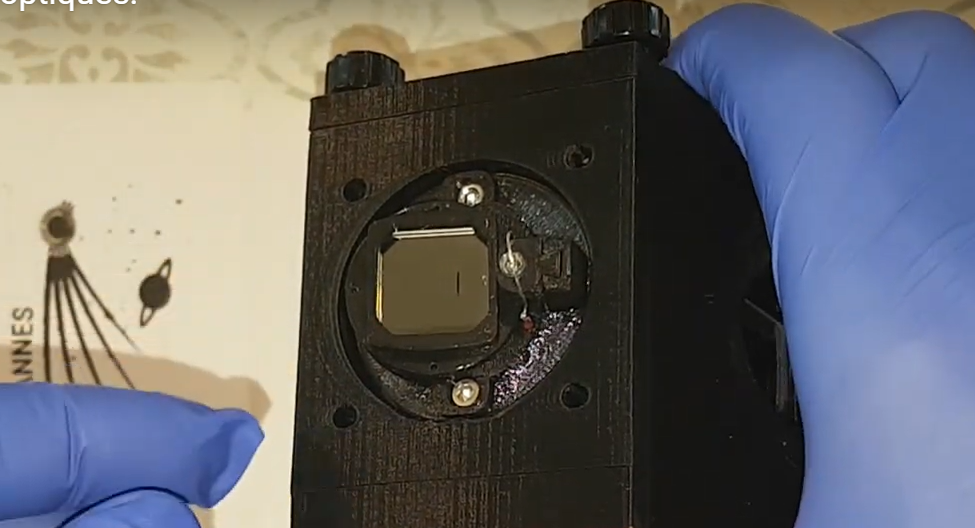
b- l’aimant de fin de course de mise au point, pièce plastique 402_support_M2 sur le coté du chariot.
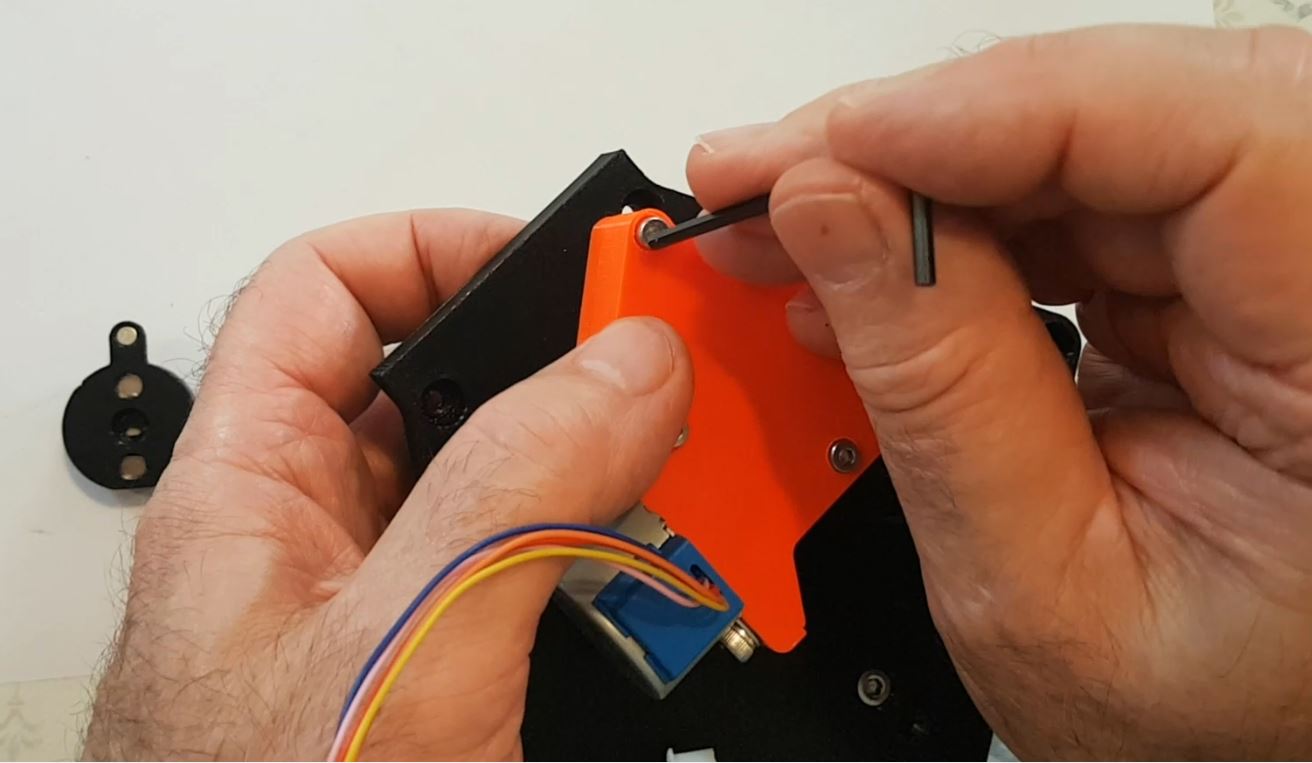
Avant que le chariot arrive en butée la LED rouge doit s’allumer. Si ce n’est pas le cas ne pas hésiter pas à légèrement incliner le capteur

































































Bonjour à toute l’équipe,
vous faites un travail formidable.
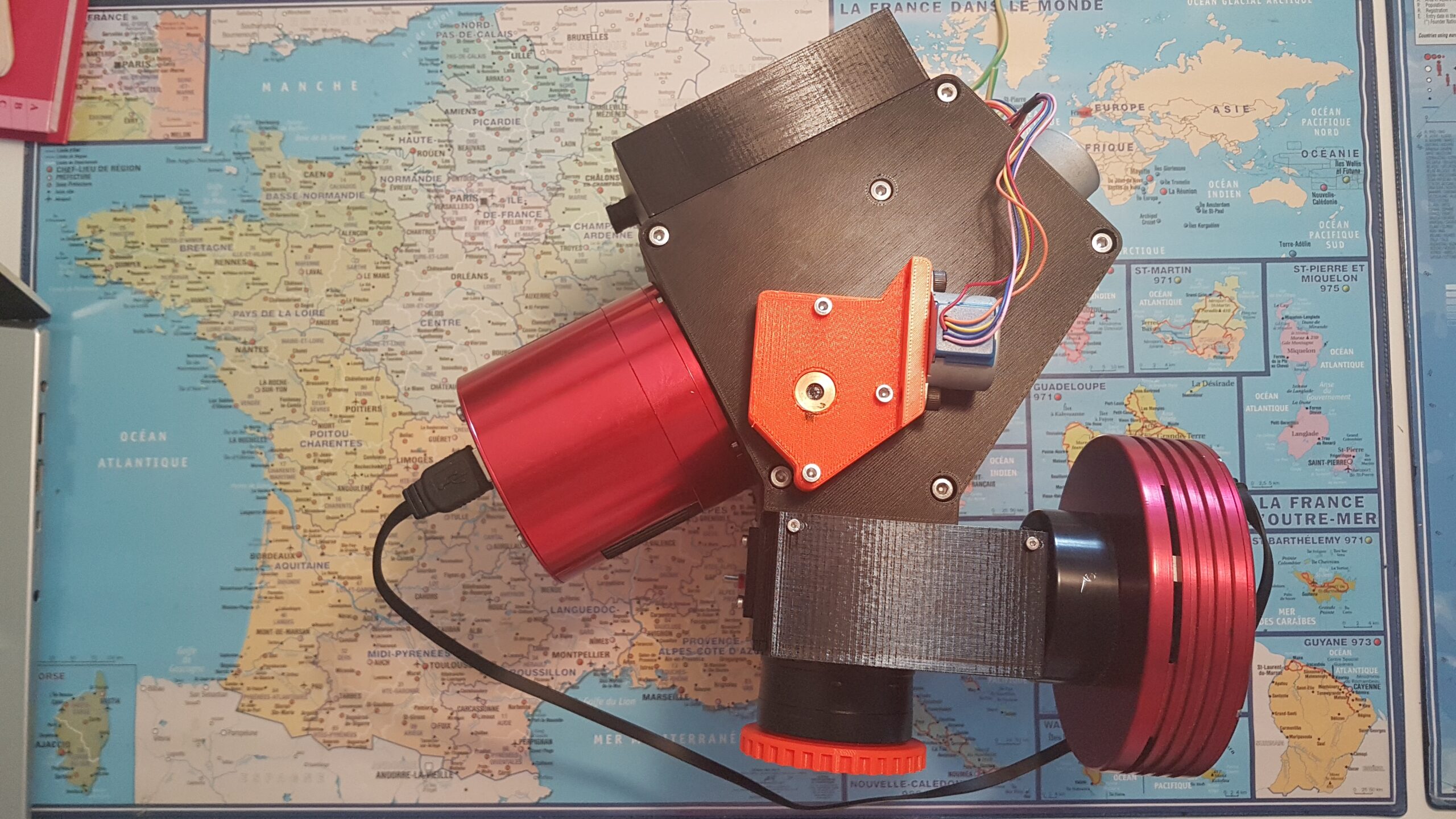
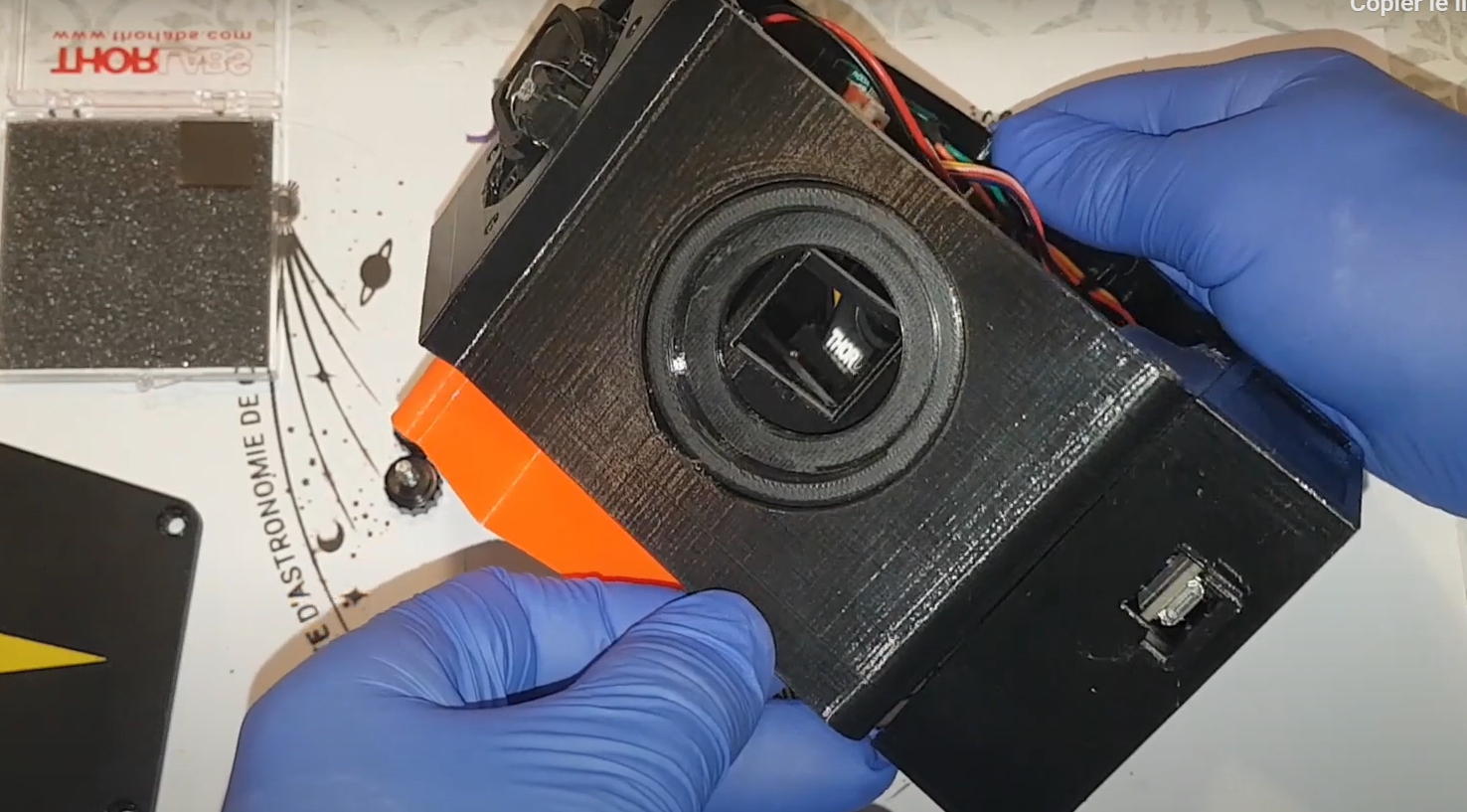
Je propose une amélioration sur l’Uvex4i : ajouter un bouchon sur le capot afin de sortir le réseau sans avoir à démonter les 5.
Gain sur les entrées de poussières qui serait limité par le diamètre du bouchon.
Salutations
Bonjour Thierry
Bonne idée que voilà , l’idée est très bonne tu peux partager ton idée sur la liste Uvex4- Béta en précisant le descriptif plus détaillé de ton idée. Aussi si mes collègues sont OK on pourra faire une ouverture sur le capot de l’uvex4 ( étanche à la lumière ) pour y insérer le bouchon .
Bonne journée
L’équipe Uvex4